





























LINE SENSOR
CALIBRATION1,2
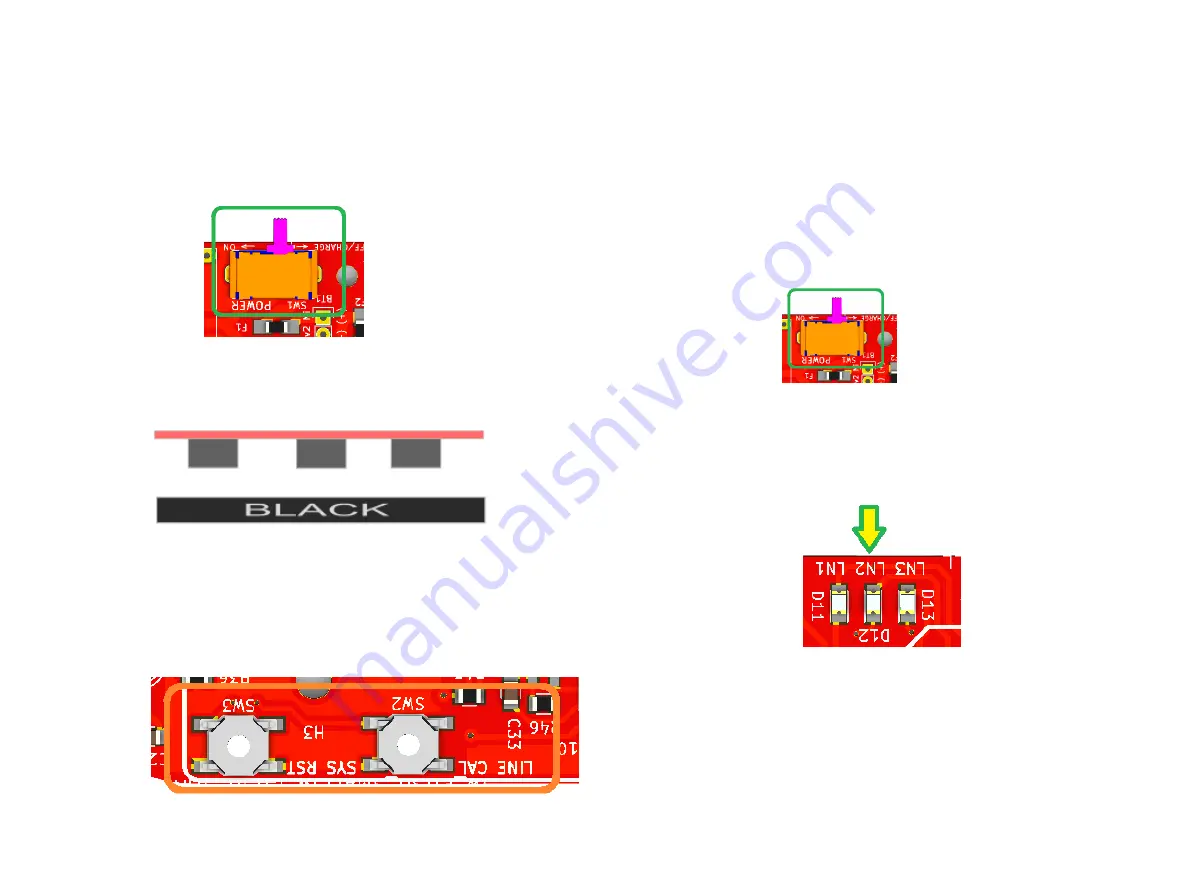
1. After uploading your code for linesensors.
Turn OFF the POWER switch.
2. Place the eGizmo PBOT controller to the "black
line" then
Turn
Off
A.
B.
C.
Turn On
Press and Hold LINE CAL and SYS RST,
while pressing and holding the buttons,
Turn ON the POWER Switch.
LN2 (D12 LED indicator) is ON.
Summary of Contents for gizDuino 168
Page 4: ...PBOT 2018 BOARD MAJOR PARTS...
Page 7: ...Setting Up your Arduino IDE with Ardublock...
Page 9: ...Open the ArduBlock The Ardublock shown in Tools list Click ArduBlock Done...
Page 10: ...Familiarize with Blocks THE IDE...
Page 17: ...For PBOT2018 blocks E GIZMO PBOT2018 BLOCKS USE FOR NEW PBOT BOARD...
Page 18: ...Connect the PBOT to PC USB Connector USB Cable Open Arduino IDE...
Page 25: ...SERIAL MONITOR BY ADDING THE SERIAL PRINT BLOCK...
Page 27: ...FOR BLACK LINE SENSING LEFT...
Page 28: ...FOR BLACK LINE SENSING CENTER...
Page 29: ...FOR BLACK LINE SENSING RIGHT...
Page 30: ...FOR WHITE LINE SENSING LEFT...
Page 31: ...FOR WHITE LINE SENSING CENTER...
Page 32: ...FOR WHITE LINE SENSING RIGHT...
Page 37: ...Move Forward Motors forward at 120 PWM speed in 2 secs...
Page 38: ...Reverse Motors Motors reverse at 120 PWM speed in 2 secs...
Page 39: ...Turn Right Motors A turning right at 120 PWM speed in 2 secs...
Page 40: ...Turn Left Motors B turning left at 120 PWM speed in 2 secs...
Page 41: ...Motor Stops Both Motor stops at 0 speed in 2 secs...
Page 42: ...Extreme Right Motors A forward and Motor B reverse at 120 PWM speed in 2 secs...
Page 43: ...Extreme Left Motors A reverse and Motor B forward at 120 PWM speed in 2 secs...
Page 49: ...SERIAL MONITOR BY ADDING THE SERIAL PRINT BLOCK...
Page 51: ...FOR OBJECT DETECTION RIGHT...
Page 52: ...FOR OBJECT DETECTION CENTER...
Page 53: ...FOR OBJECT DETECTION LEFT...
Page 54: ...SERVO CONNECTION Servo labels 1 4 Servo connectors from P3 P6 Servo Supply J2...

































































