





























- 33 -
Non-linear error compensation
1
2
3
4
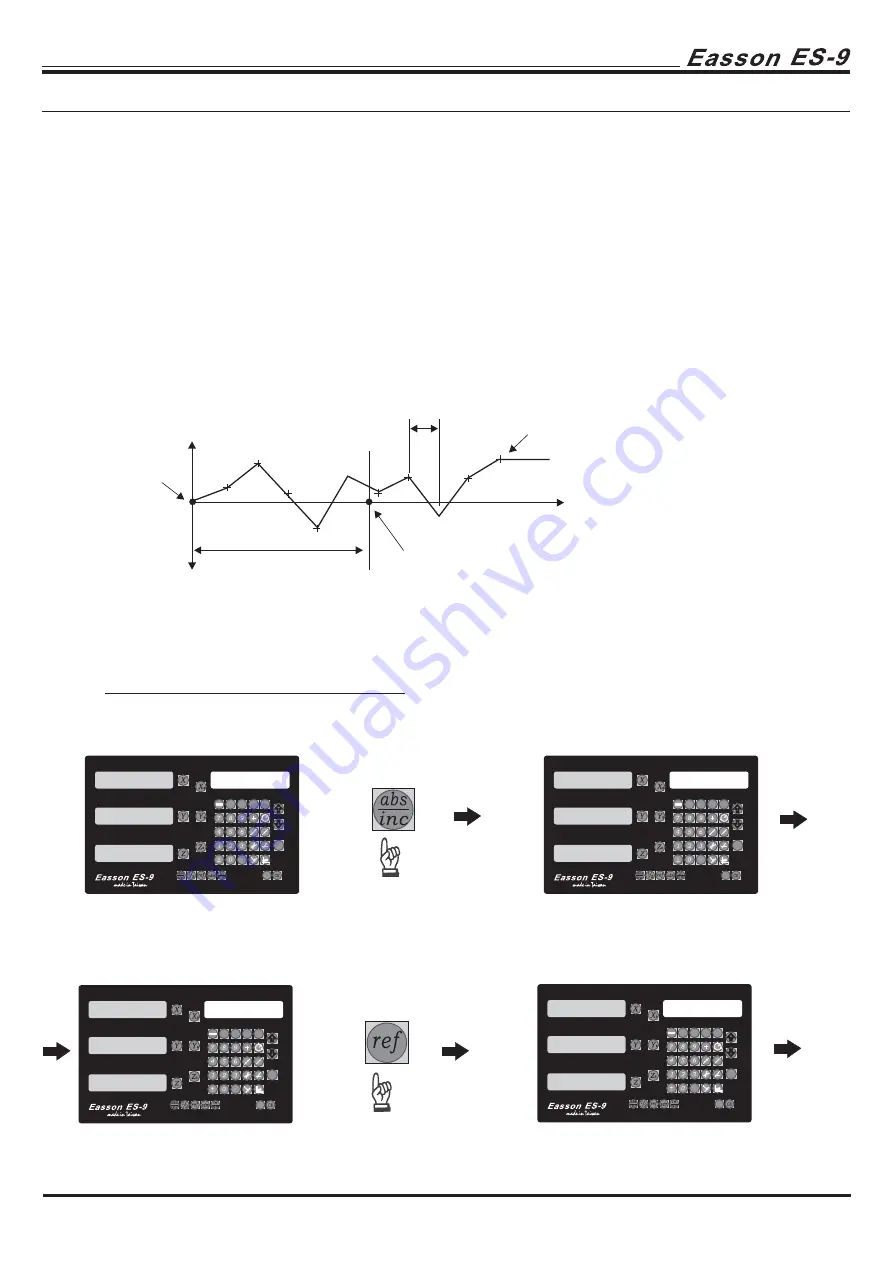
CP.START
CP.PITCH
CP.STEP
= 10
CP.STEP
:compensation
profile step
CP.PITCH
:compensation
profile pitch
CP.START
: compensation
profile start
REF
5
6
7
8
9
10
Because of the structural design of profile projector, the over-hang problem of table is inevitable and the Abbe error is exist.
To achieve maximum possible accuracy for measurement, error compensation is commonly used. ES-9Q provides non-linear
error compensation to improve measurement accuracy to maximum possible limit .
Principle of operation :
Non linear error compensation make use of the REF (reference mark) position of linear scale to locate the absolute position
of the projector. The readout's CPU then compensate the readout readings according to the error table that built in during the
set up process. The compensation always started from the CP. START position and only compensate towards the positive
direction. In other words, it is vital to have the CP. START position located at the most negative position of projector travel.
RD-15Q offers a maximum of 303 non-linear compensation step, linear compensations is effect between the compensation
steps.
( must be located
at the most
negative position
of the projector
travel )
error curve
start position
error
error curve
position
( + direction)
Operation procedure
1) Locate the REF zero at ABS coordinate
swap the readout display
to ABS coordinate
Polar
XY
Store
Recall
R/D
Enter
Q
FINISH
ABS
Polar
XY
Store
Recall
R/D
Enter
Q
FINISH
SEL MODE
Polar
XY
Store
Recall
R/D
Enter
Q
FINISH
Sdm 9
Sdm 9
Polar
XY
Store
Recall
R/D
Enter
Q
FINISH
ABS







































































