
























Installation
M-Max Series Adjustable Frequency Drive
MN04020003E—October 2013 www.eaton.com
49
Insulation Testing
The M-Max series frequency inverters are tested, delivered
and require no additional testing.
WARNING
On the control signal and the connection terminals of the
frequency inverter, no leakage resistance tests are to be
performed with an insulation tester.
WARNING
Wait at least 5 minutes after switching the supply
voltage off before you disconnect a connection on the
connection terminals (L1, L2/N, L3, U/T1, V/T2, W/T3,
R+, R–) of the frequency inverter.
If insulation testing is required in the power circuit of the
PDS, you must consider the following measures.
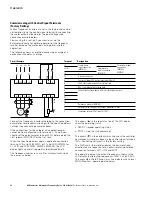
Testing the Motor Cable Insulation
Disconnect the motor cable from connection terminals U/T1,
V/T2 and W/T3 of the frequency inverter and from the motor
(U, V, W). Measure the insulation resistance of the motor
cable between the individual phase conductors and between
the phase conductor and the protective conductor.
The insulation resistance must be greater than 1M ohm.
Testing the Input Cable Insulation
Disconnect the power cable from the input supply network
and from connection terminals L1, L2/N and L3 of the
frequency inverter. Measure the insulation resistance of the
input cable between the individual phase conductors and
between each phase conductor and the protective
conductor.
The insulation resistance must be greater than 1M ohm.
Testing the Motor Insulation
Disconnect the motor cable from the motor (U, V, W) and
open the bridge circuits (star or delta) in the motor terminal
box. Measure the insulation resistance of the individual
motor windings. The measurement voltage must at least
match the rated voltage of the motor but is not to exceed
1000V.
The insulation resistance must be greater than 1M ohm.
Consider the information from the motor manufacturer in
testing the insulation resistance.







































































