





























5 EyesMap Modules
User Manual
71
5.4.2.3.
What happens if you get lost?
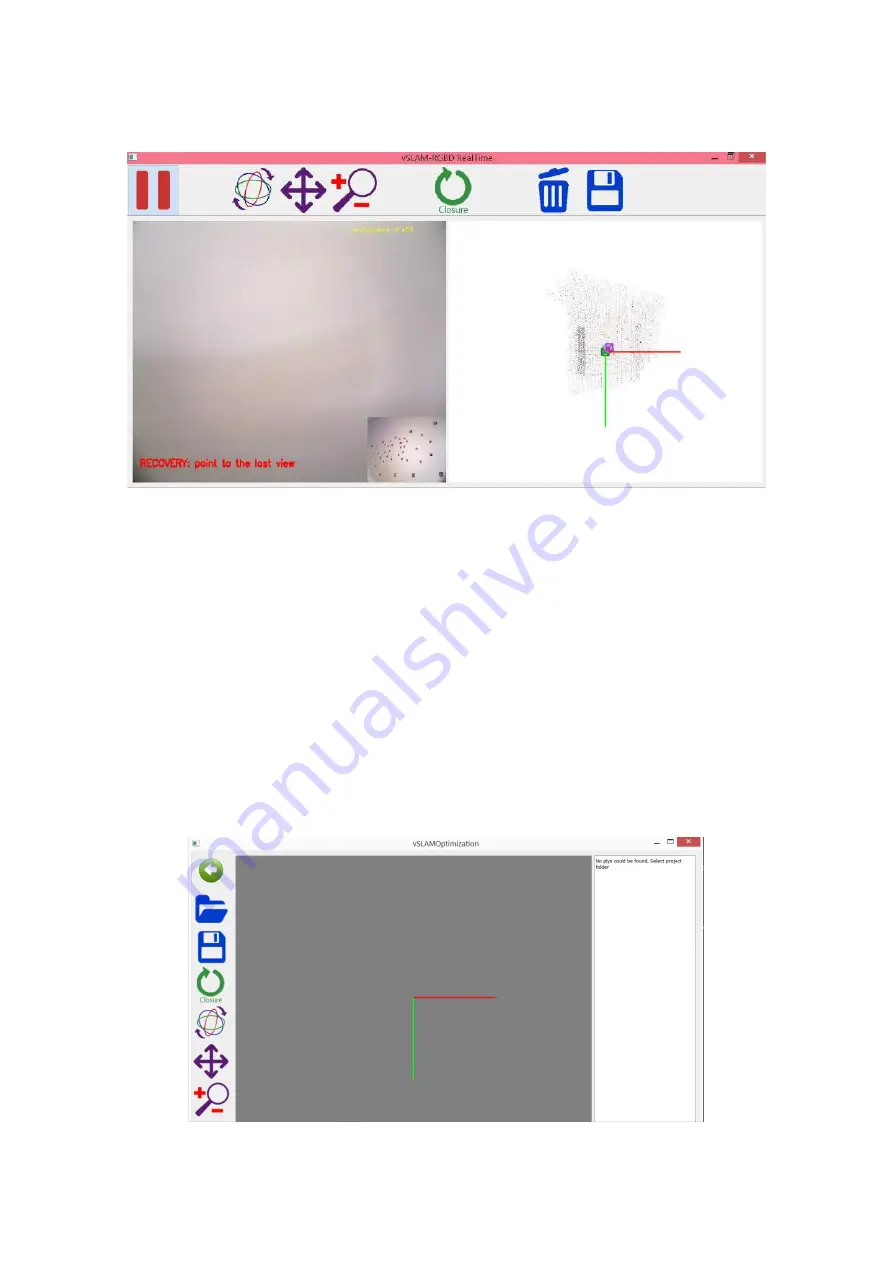
The message shown in the previous image,
“RECOVERY: point to the last view
,
” tells
the user that the process has not found enough points to pair the last stored key frame
with the current image.
In order to help with the continuing of the capture, a window appears with the image of
the last key frame captured. Try to make the real-time camera image line up with the
image of the last correct key frame in order to continue the process.
5.4.3.
Post-Processing Software
This application allows you to improve a result obtained in real time. Thanks to a high
level of data processing, the post-processing application can correct possible
orientation errors in the models generated in real time.
Summary of Contents for eyesmap
Page 1: ...USER MANUAL EYESMAP Version 1 0 Revision A June 2015...
Page 9: ...2 Technical Specifications In this chapter we shall see Tablet Cameras Depth Sensor GPS IMU 2...
Page 118: ...7 Practical cases User Manual 118 Medium Object...
Page 119: ...7 Practical cases User Manual 119 Small Object...
Page 120: ...7 Practical cases User Manual 120 7 1 1 2 Photo Development and Management...
Page 121: ...7 Practical cases User Manual 121 Small Objects...
Page 126: ...7 Practical cases User Manual 126 9 Orientation Points...
Page 129: ...7 Practical cases User Manual 129 Click on Confirm...
Page 130: ...7 Practical cases User Manual 130 The distance of the stereoTarget will be saved Click on Next...
Page 134: ...7 Practical cases User Manual 134...
Page 191: ...7 Practical cases User Manual 191...







































































