





























E
RROR
M
ESSAGES
TECHNICIANS SETTINGS M
ENU
41
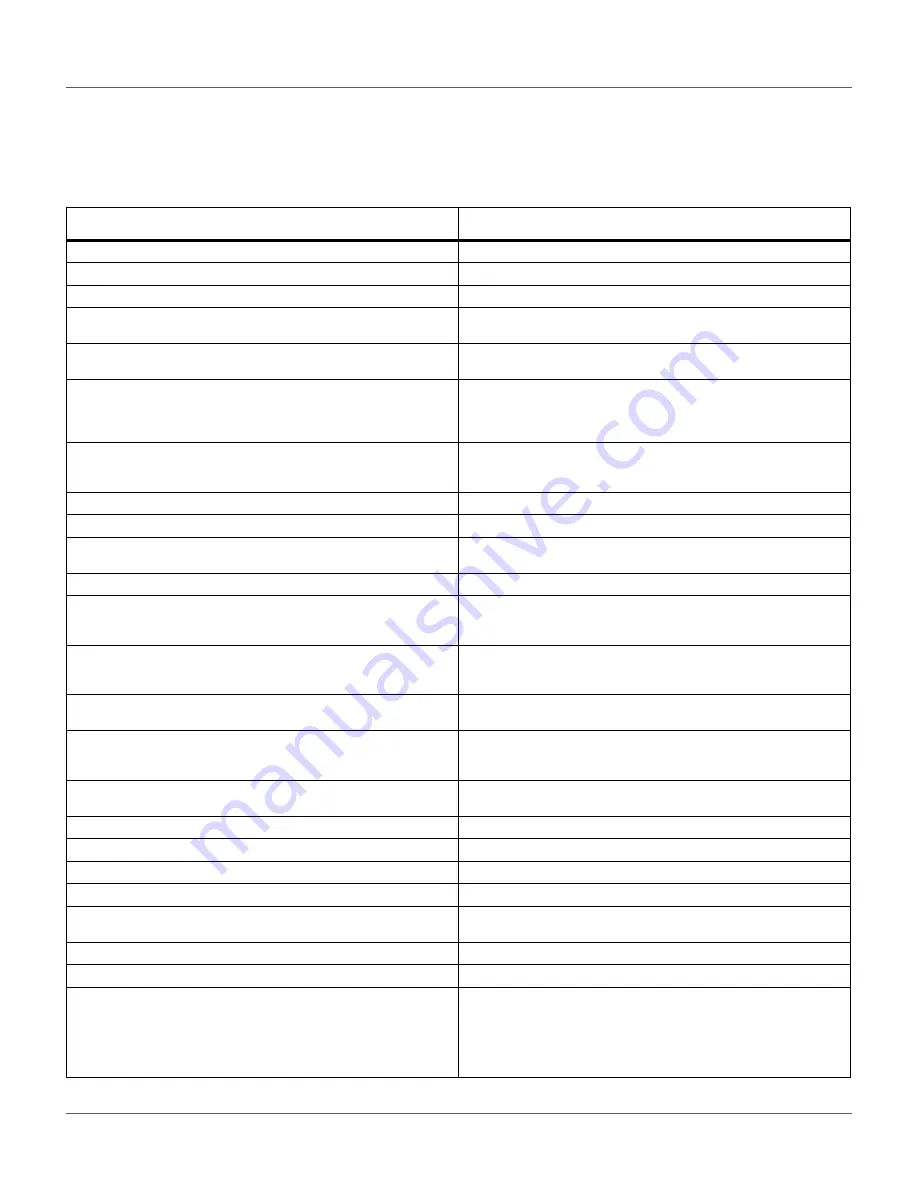
9 Error Messages
Error messages are displayed an alarm has been raised. Report error messages to your authorized ECHO Robotics
Dealer. Always note the date, time, and robot serial number.
Error Message
Description
Battery temperature issue
Battery temperature is above or below the allowed limit.
Battery over voltage
One, or more, battery cell voltage is over the limit.
Bad battery connection
Internal problem with the battery.
Bad battery measure
Values displayed for the battery on the GUI menu do not correspond
to the actual values.
BMS communication wire is not connected
BMS (Battery Management System) wire is not connected properly.
This refers to the electronic part of the battery.
Shutdown in 2 min / inhibit shutdown principal / unblock brakes
GUI (Graphical User Interface) menu displays the alarm- and asks if
you want to inhibit the shutdown. The LED is blinking very fast (~5x
per second). The brakes are deactivated. Battery charge level is
critically low.
Some wires not well configured. Please add at least one parcel to each
wire
Configuration of wires and parcels is incorrect. At least one wire must
be defined in the installation configuration, and at least one parcel
must be assigned to each wire.
No charge current; Check contacts and charging station
Charging station voltage is detected but there is no supply current.
The robot has no wire to mow. Please configure at least one wire.
No wire has been configured.
The robot has no parcel to mow. Please configure least one parcel.
No parcel has been configured. At least one wire must be configured
defining a field to mow, and a parcel must be defined for each wire.
No peripheral signal!
Robot is unable to detect a valid magnetic signal.
Station contact lost for {0}s!
Robot has reached the charging station and started to charge, but at a
certain time the charging station contact is lost. If the contact loss lasts
for more than one hour, this alarm is triggered.
Wrong wire and parcels Configuration
Robot has encountered a problem while mowing in a particular parcel.
When the robot re-starts it is not sure in which parcel it is located, and
where it should start mowing.
No station contact detected
The robot has executed the loop step, but has not made contact with
the charge arms after 29 m (by default).
Wire Lost during TrackWire!
Robot is following the track wire and is then unable to detect a signal
on the wire. When this happens the robot will rotate 360° in an
attempt to detect a phase difference, and then issue this message.
Unlock system: bad pin code
“System blocking” is set and must be unblocked by entering a pin
code. An incorrect code has been entered.
Unable to find the working area
The robot is unable to find a valid magnetic signal.
Failed to dock to station
Robot has tried to return to the charging station but failed.
Head {0} is blocked!
Occurs when a cutting head should be spinning, but is not
Head {0} did not start!
Cutting head should be spinning but it does not start.
Motor blocked when going {0} to {1}mm
A command to change the cutting height has been issued, but the
cutting head can not move.
There is no 12V peripheral for {0}
12 V power supply does not work properly.
There is no 5V for {0}.
5 V power supply does not work properly.
STOP button issue detected
Stop button is not operating correctly. The Stop button lid must be
closed when the robot is operating. The Stop button lid is determined
to be closed by detecting a closed circuit between magnets on the lid
and relays in the cover. If these magnets are and relays are not
connecting correctly the correct state of the lid can not be
determined. This can arise due to wide temperature fluctuations.







































































