177
He
lp
fu
l tip
s
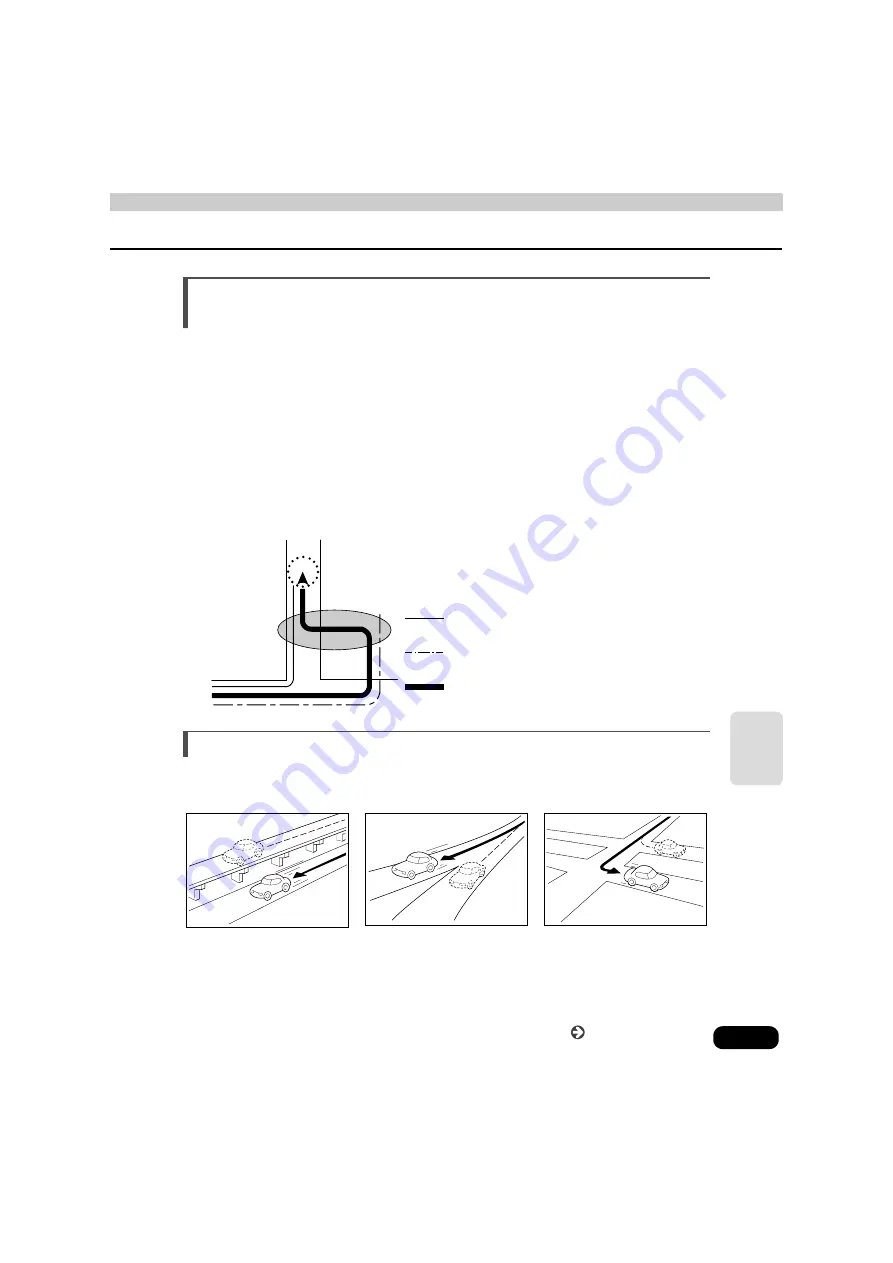
Correcting the vehicle position sensor using map-
matching
Map-matching is a system that compares present location positioning data from the GPS and
other sources with actual driving information in order to match the present location with the
most appropriate road.
This device corrects the present location data compiled from independent navigation and
satellite navigation and matches it with the shape of the road.
However, there may be instances when a present location error cannot be avoided and the
position indicated on the map does not coincide with your actual positioning, even after a
correction using map-matching.
Also, driving along a road whose actual shape differs from the map data may result in a
vehicle position mark misalignment.
Present location display, route guidance accuracy
The following situations are not malfunctions but merely some examples of inaccurate present
location positioning and/or route guidance, depending on the road and driving conditions.
The present location appears
on a road running parallel to
the road taken.
When turning on a road
forking into two roads making
a "Y" shape, the present
location appears on the other
road.
When making a turn, the
present location appears on
the road just before or after
the road turned on.
Actual path taken
Path taken as per sensor data
Screen display, correction by map matching
Continue to the next page
Summary of Contents for AVN 5495
Page 11: ...9...
Page 49: ...47 Basic operation Touch the POI you want to display Touch OK...
Page 196: ...194...
Page 197: ...195 For reference...
Page 198: ...196...