





























Settings
EFORT INTELLIGENT EQUIPMENT CO.,LTD
112
Position 4
POINTC
Robot gripping workpiece position point (this
point must be used in conjunction with
wobj_cvy)
Position 5
POINTJ
Workpiece placement point
Note: For position 3 and position 4, the values of these two position points are
not obtained by means of a teach-in, but must be edited directly for them, and the va
lues have strict requirements according to the gripping attitude:.
Position 3: POINTC (0, 0, Z, 0, 0, 0, 180)
Position 4: POINTC (0, 0, 0, 0, 0, 0, 180)
Where "Z" is the height between the end of the tool and the gripping point of the
workpiece. See the screenshot of the program below for details.
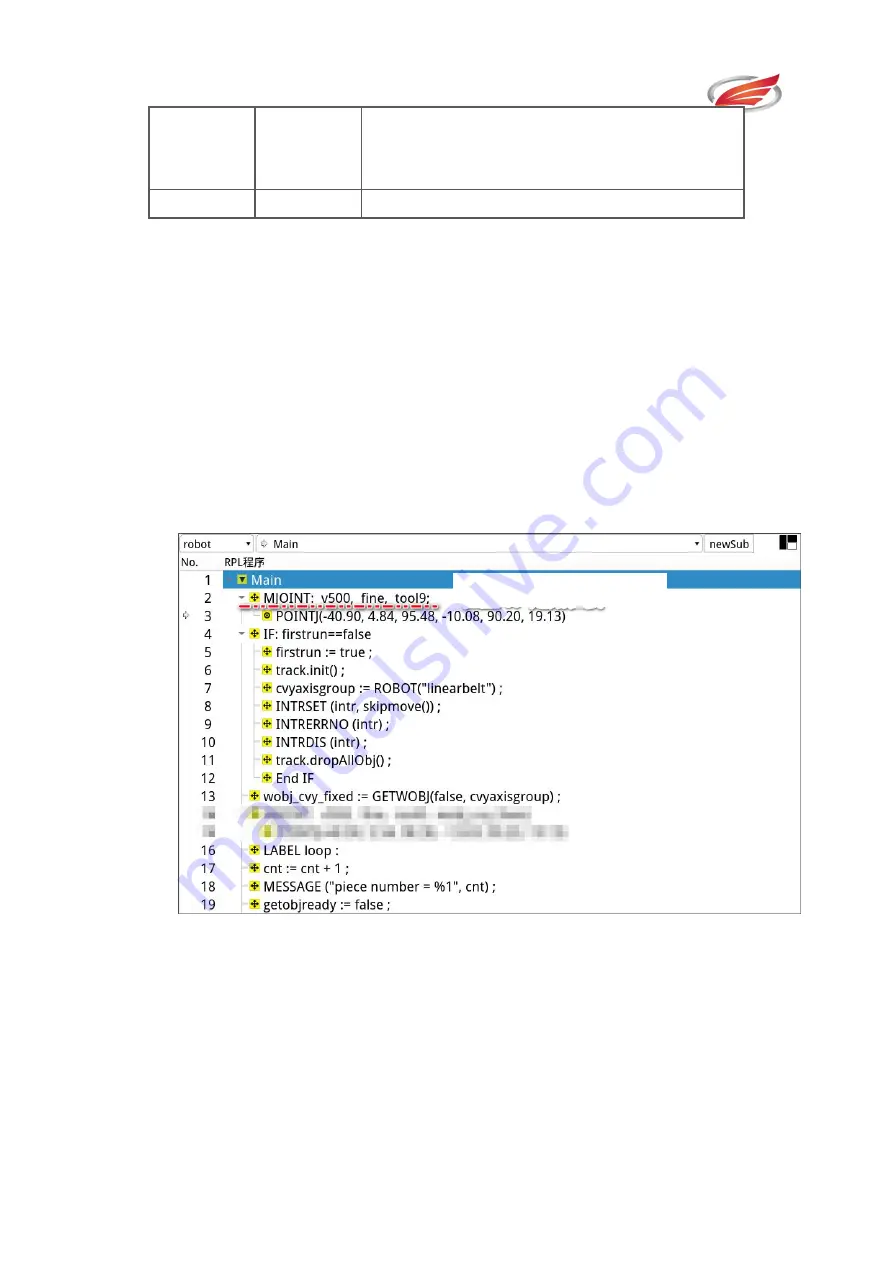
The following are screenshots of the RPL program code, user-defined variables.
I. Main program
Position 1: initial position







































































