





























Settings
EFORT INTELLIGENT EQUIPMENT CO.,LTD
136
4
1
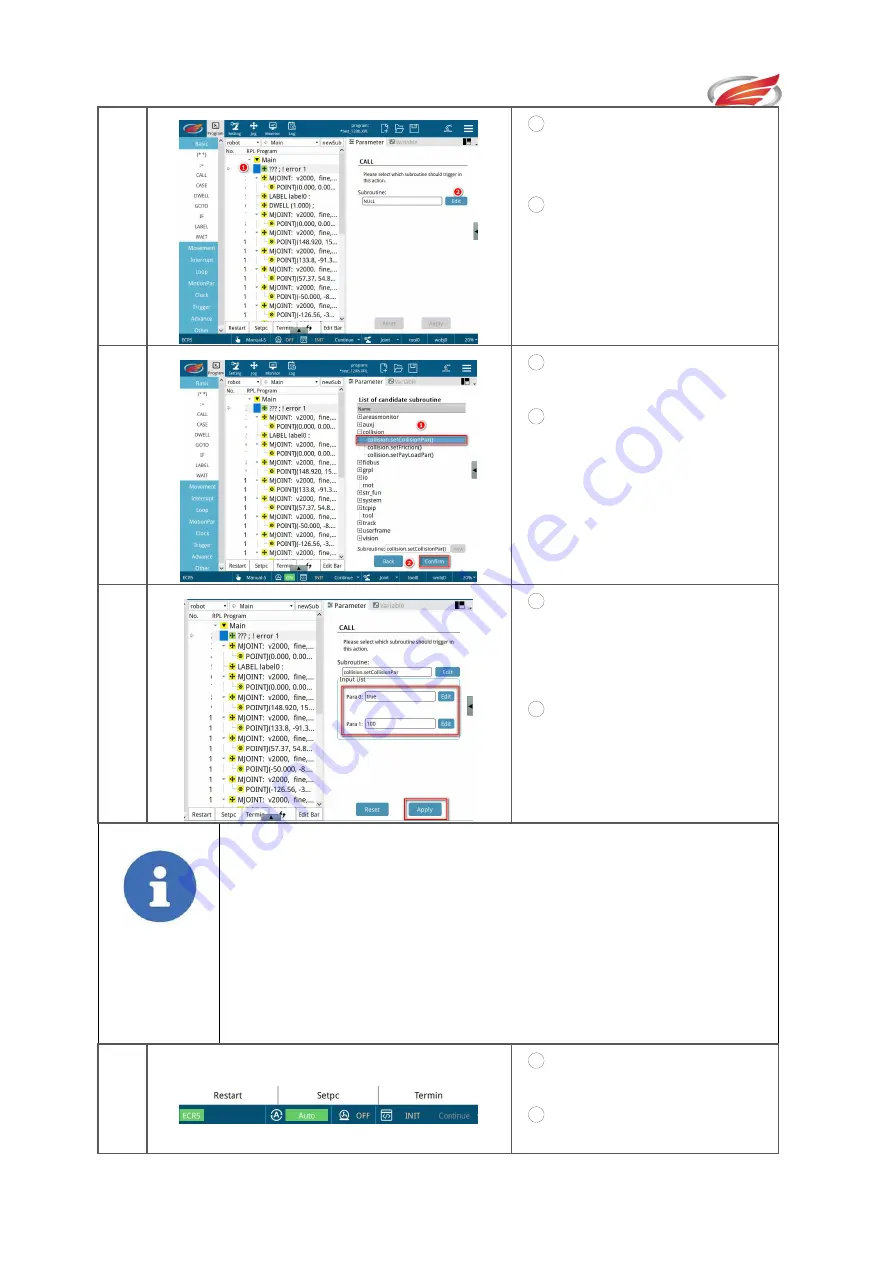
Select the line where the CA
LL command is located, that is, t
he first line “
???
;!error 1”;
2
Click the “edit” button.
5
1
Select “collision.setCollisionPar
()”;
2
Click the “confirm” button.
6
1
Click the “edit” button to set
the values in “parameter 0” and
“parameter 1” as: “true” and “10
0” respectively;
2
Click the “apply” button to sa
ve the above settings.
Notes!
Parameter 0: BOOL type, indicating that collision detection is turned on / off from
this program segment;
Parameter 1: DINT type, indicating “parameter set in module function” in the
above S(RPL) formula, is a sensitivity gain.
7
1
The robot status is set to “a
utomatic mode + upper servo”;
2
Click the “program running” b
utton to make the robot execute t






































































