





























Settings
EFORT INTELLIGENT EQUIPMENT CO.,LTD
137
he program.
8
During the movement of the robot, the object is used to collide with the robot body, a
nd the robot will stop, then the collision detection function will work normally.
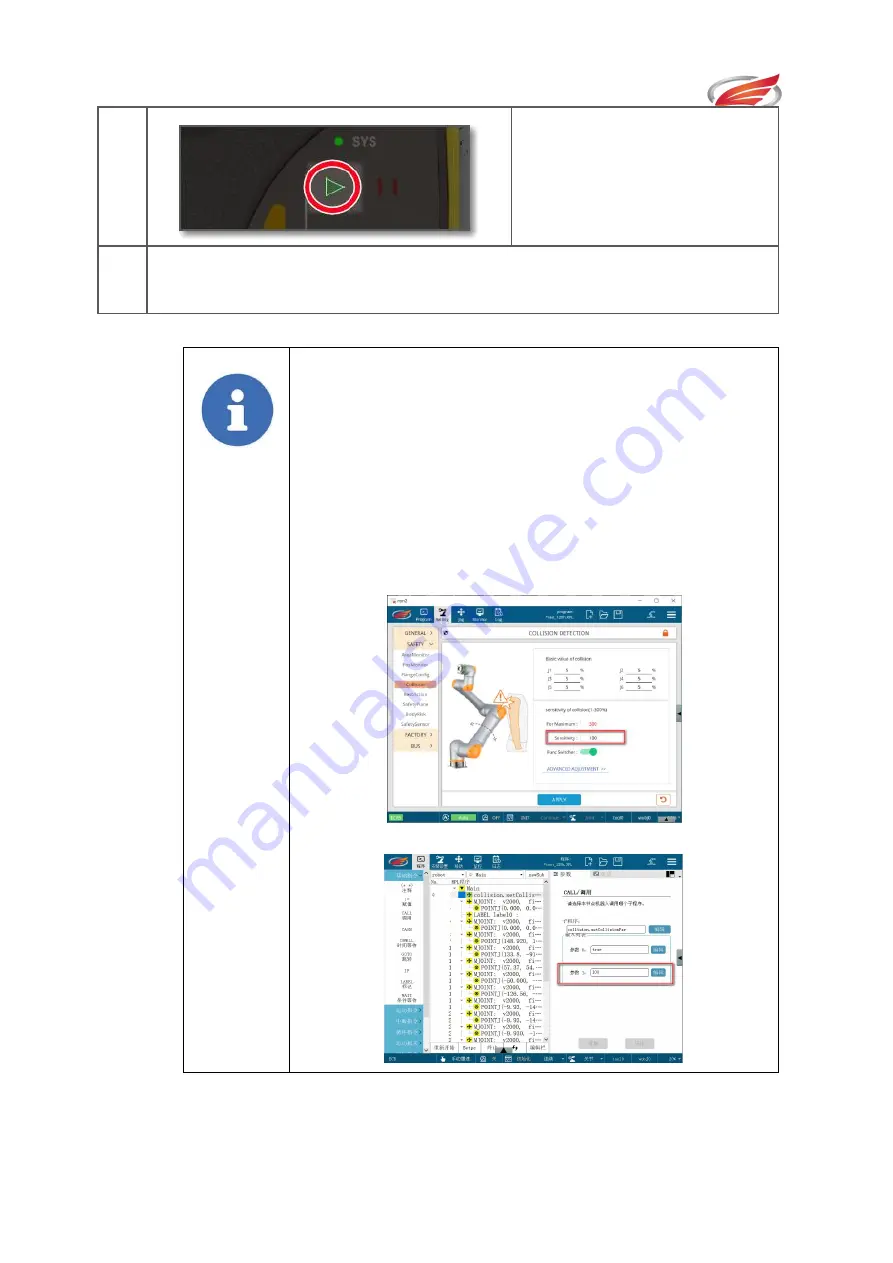
Notes!
If the robot sends a collision alarm without any collision when executing
the program;
Or actual collision happens without stop and alarm;
You need to adjust “sensitivity” or parameter 1 of collision.setCollisionPar
in the program code line. (The lower the value, the easier it is to trigger the
collision
alarm.)






































































