





























Settings
EFORT INTELLIGENT EQUIPMENT CO.,LTD
152
Notes!
For authorization code, please consult our after-sales personnel.
5.3.1 Sliding Datum Point
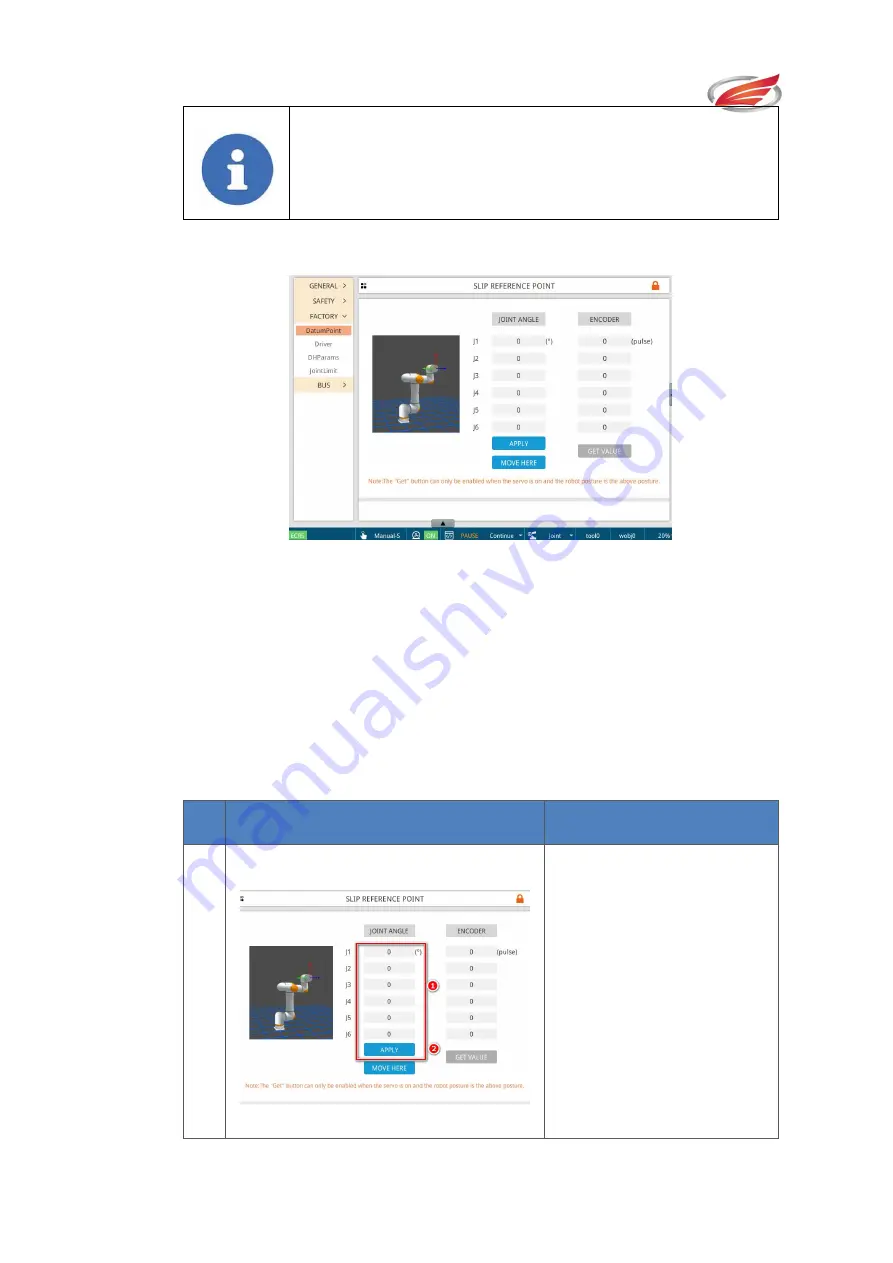
Figure 5-45 Sliding Datum Point
The sliding datum point is to record a group of joint angles and encoder values
after the calibration of home position of the robot. When the user makes the robot
have a serious collision, resulting in the deviation, the deviation can be
compensated in combination with the “general / joint slip compensation” function,
that is, the “slip datum point” is the premise of the “joint slip compensation”
function.
Operation steps for setting the sliding datum point are as follows:
#
Diagram
Description
1
①
Directly edit the text box
and set the joint angle;
(Note: the position that can
be moved needs to be set ac
cording to the site environm
ent)
②
Click the “apply” button
to save the joint angle settin







































































