





























Settings
EFORT INTELLIGENT EQUIPMENT CO.,LTD
154
Steps for resetting the home position:
#
Diagram
Description
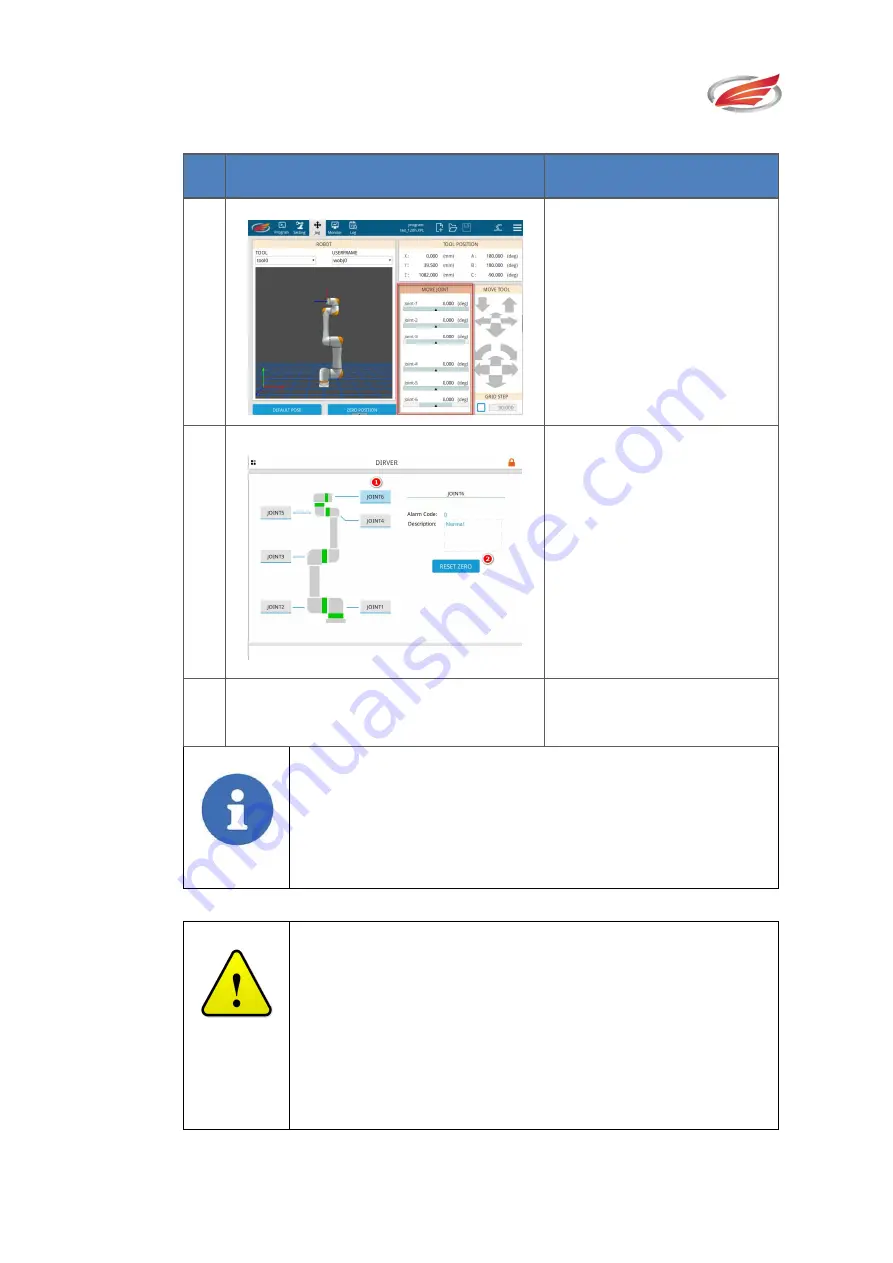
1
①
In the “step motion” mod
e, each axis of the JOG rob
ot makes the robot move to
the home position in reality.
(Note: the value of each axi
s may not be ‘0’)
2
Enter the “reset drive” page;
①
Select “joint-6”;
②
Click “reset zero” button;
that is, to complete the cle
aring of joint-6 .
3
Repeat step 2 in turn to co
mplete the reset of all joints.
Notes!
If the additional axis is configured, the resetting of home
position of the additional axis is also carried out in this
interface.
Attention!
Resetting the home position must be performed by a
professional technician after the operation of “calibration of
home position”.
The most accurate value is the home position which is
determined by the calibration of home position.





































































