





























Basic Operations
EFORT INTELLIGENT EQUIPMENT CO.,LTD
12
3.2 JOG- Joint Movement
Turn on the servo as illustrated in the previous section before proceeding to the
following steps:
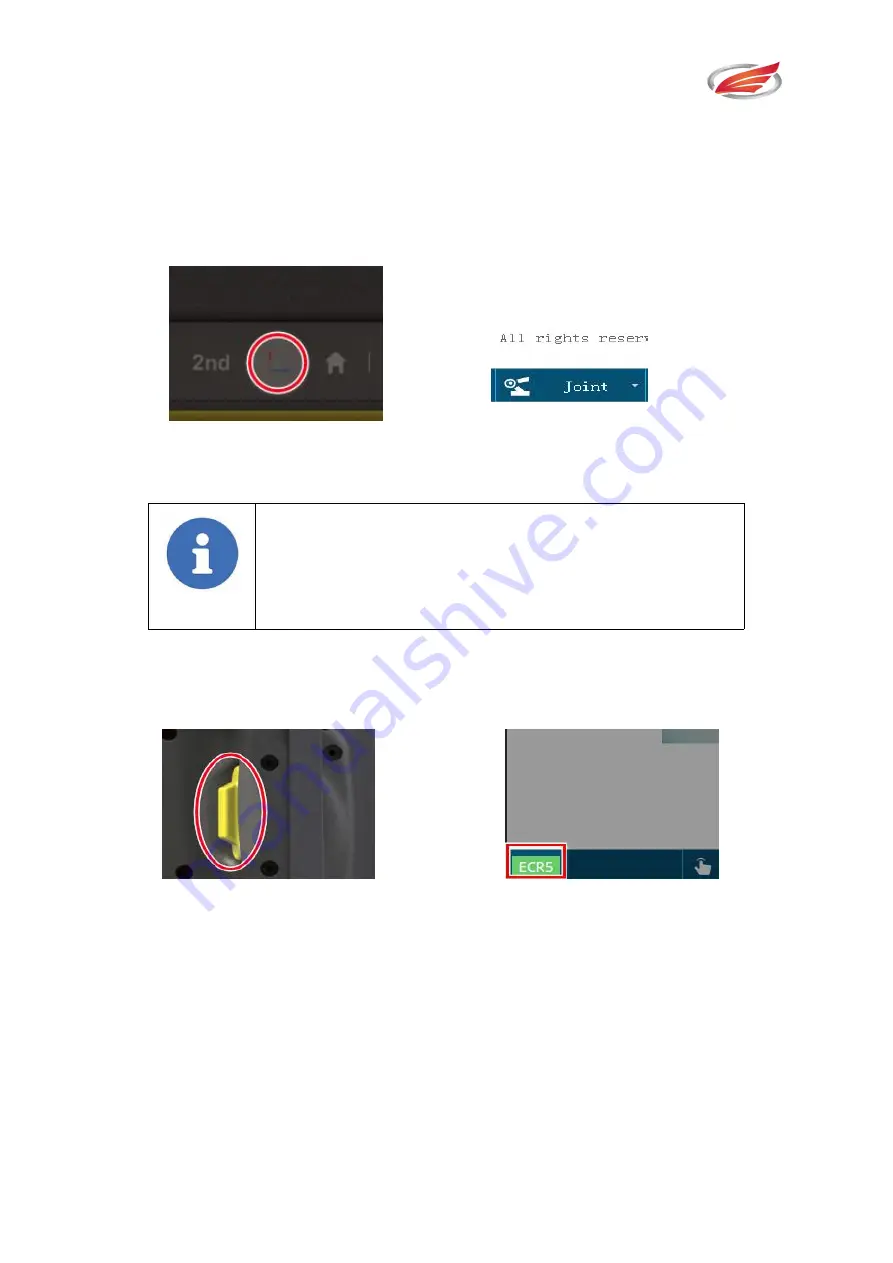
Step 1: Press the motion reference switch in the teach pendant and turn to joint
movement mode as shown in figure 3-3.
(Left)
(Right)
Fig. 3-3 Joint Movement Mode
Note!
The motion reference switch is disabled in the Auto mode. The
motion reference switch is enabled only in Manual-S or
Manual-F mode.
Step 2: Press the enabling key at the back of the teach pendant and the ECR5 icon on the
status bar turns green as shown in figure 3-4.
(Left)
(Right)
Fig. 3-4 Enabling Key
Step 3: Hold the enabling key with the left hand and press the control key “-” or “+” to
rotate the first joint in the positive or negative direction as shown in figure 3-5. The robot
movement stops once the enabling key is released.



































































