





























Settings
EFORT INTELLIGENT EQUIPMENT CO.,LTD
58
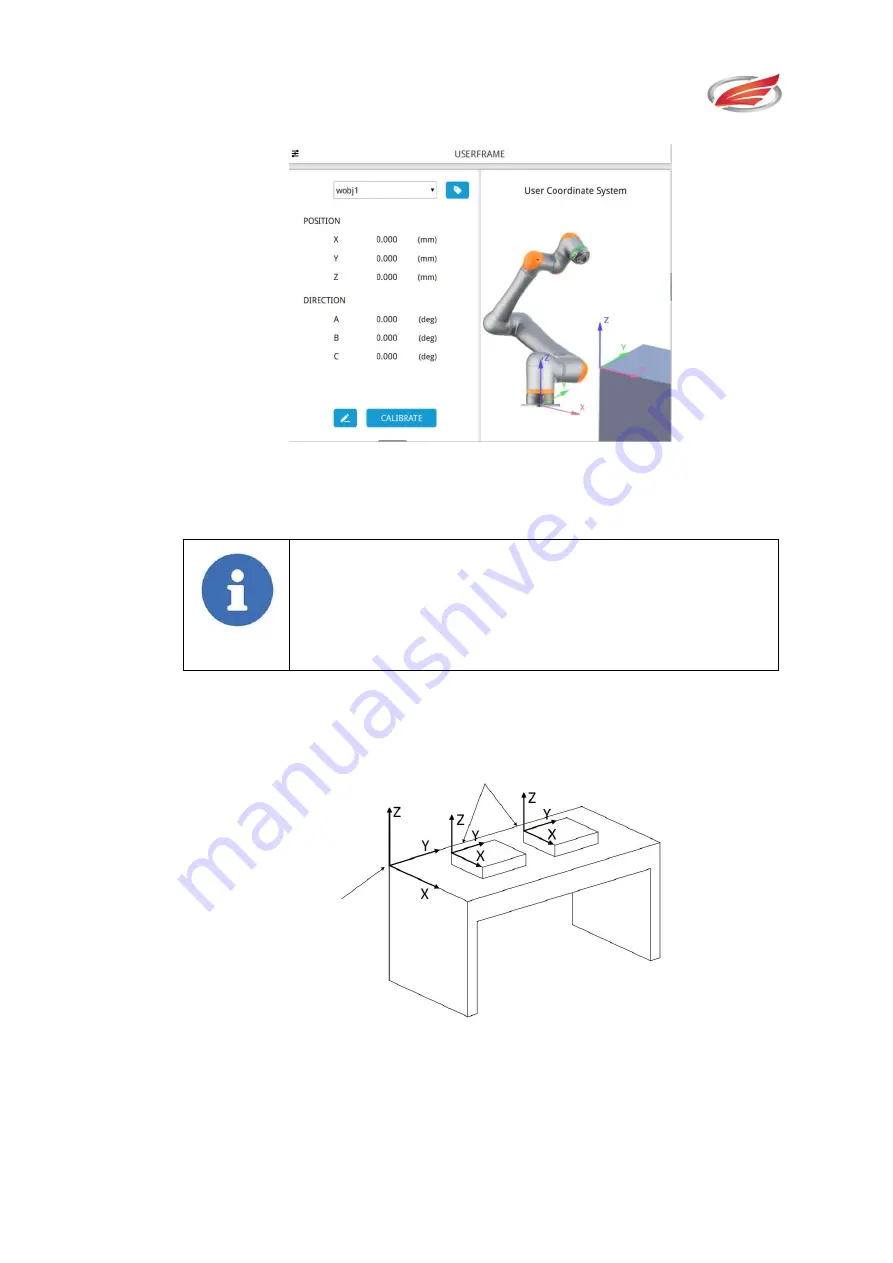
5.1.3 User Coordinate System (User Frame)
Fig. 5-5 “User Frame” Interface
Users can calibrate, modify or activate the user coordinate system in the configuration
page. There are 5 undefined tool objects (wobj1~wobj5) in the system.
Note!
All the parameters for wobj0 are zero and cannot be modified
or recalibrated. Wobj0 stands for the base coordinate system
with the robot base as the origin.
The user coordinate system is illustrated in the following figure.
Fig. 5-6 Schematic of User Coordinate System
The procedures for activation, calibration and edition of the user coordinate system are
the same as those explained in section 5.1.2. The only difference lies in point teaching.
Description of Calibration Procedures for User Coordinate System is shown in table 5-3.
User Coordinate System
Workpiece Coordinate System




































































