





























Settings
EFORT INTELLIGENT EQUIPMENT CO.,LTD
59
Table 5-3 Calibration Procedures for User Coordinate System
Calibration
Procedures
Remarks
With Origin
The first point is the origin of the coordinate system.
The second point is any one on the X axis in the positive
direction.
The third point is any point within the XY plane in the
positive direction of the Y axis.
Without
Origin
The first point is any one on the X axis.
The second point is any one on the X axis that in the
positive direction to the first point.
The third point is any one on the Y axis.
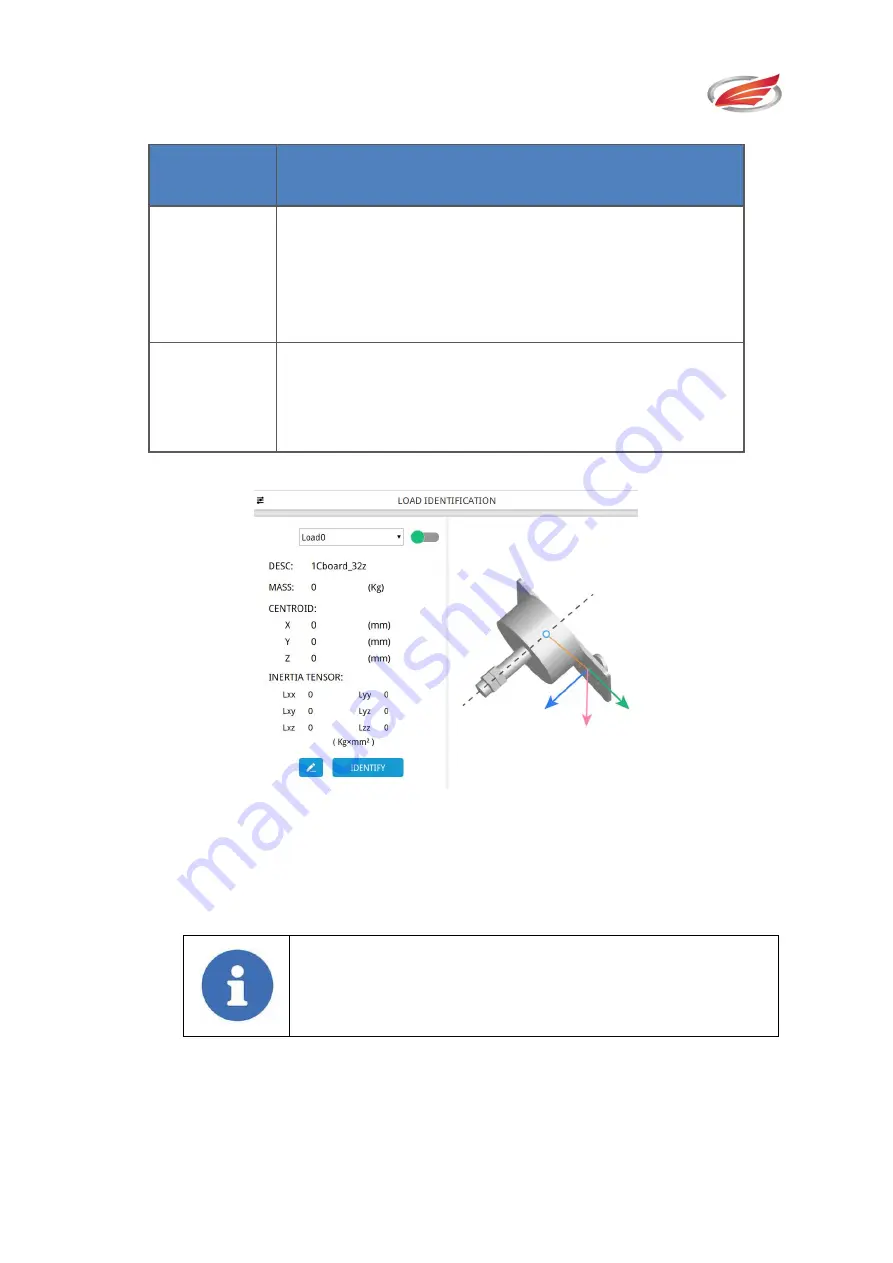
5.1.4 Load Identification
Fig. 5-7 “Load Identification” Interface
When the load is added to the end of the robot (including a tool or workpiece), it might
influence the effects of drag teaching and collision. Load identification is used to identify the
centroid or inertia tensor parameters of a tool or workpiece which provides for the basic data
for the accuracy of drag teaching function and collision function.
Note!
Load refers to any object that is loaded to the end of a robot.
Load Identification
Procedures of Load Identification:







































































