





























Settings
EFORT INTELLIGENT EQUIPMENT CO.,LTD
143
ror
unit: Nm.
13
Activation
Click to activate the currently set limit.
14
Applicatio
n
Click to save the current settings and restart the
controller.
The safety limit function page can turn on / off the performance limit of robot
motion, as shown in Figure 5-34 above. The safety of man-machine cooperation is
ensured by limiting the parameters such as robot power, TCP end speed and motor
torque. When the system detects that the limit value is exceeded, the robot will
alarm and stop.
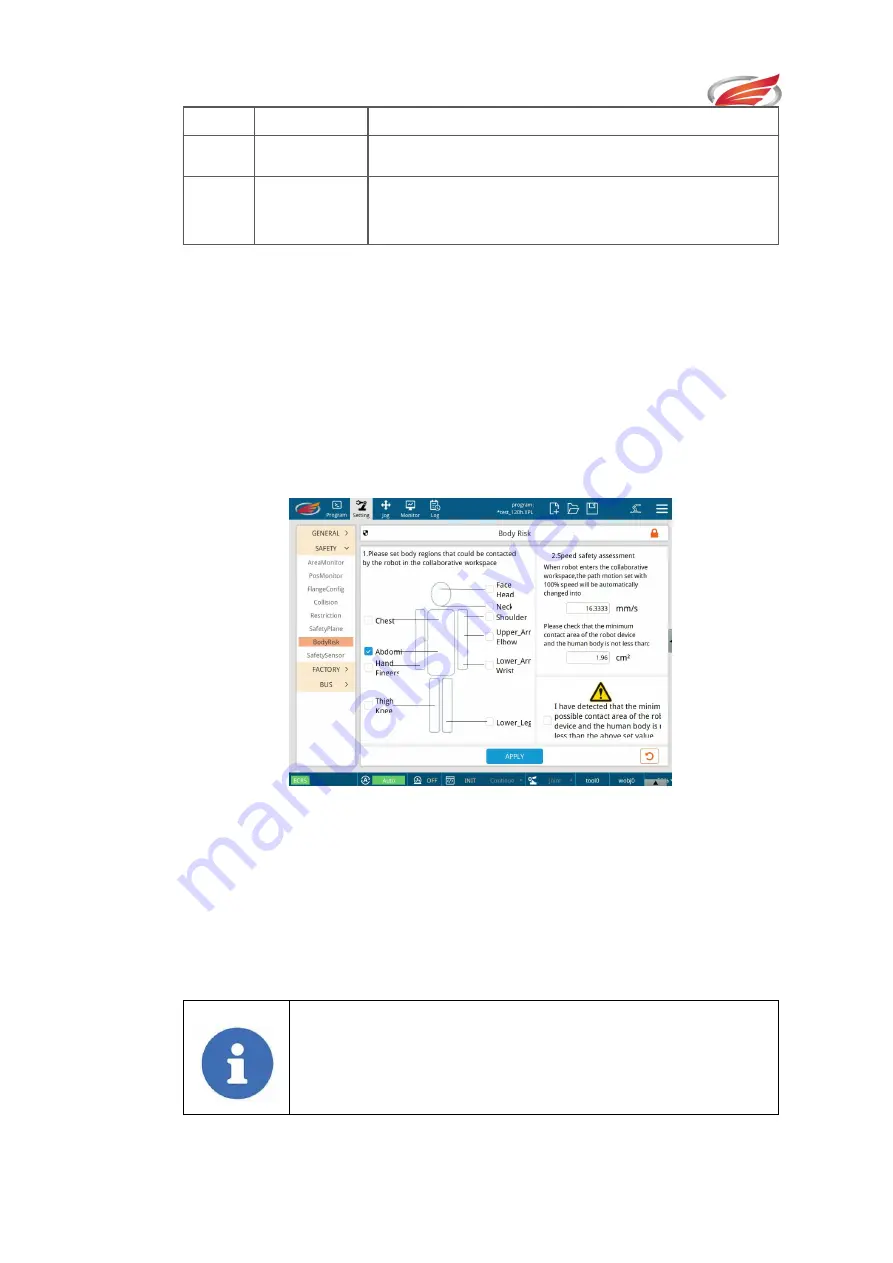
5.2.6 Physical Risk
Figure 5-36 Physical risk
Page of physical risk function: according to the human body area that may
contact with the robot in actual work (the contact area of the human body in
human-computer cooperation), check the corresponding body parts in this function
page to evaluate the degree of reduction mode that the robot should use in
human-computer cooperation. Click the “apply” button on the interface to use a set
of reduction degrees obtained from the current evaluation.
Notes!
After the evaluation, check the warning (as shown in the figure below),
otherwise it cannot be applied.



































































