





























移动
埃夫特智能装备股份有限公司
Jog
EFORT INTELLIGENT EQUIPMENT CO.,LTD
181
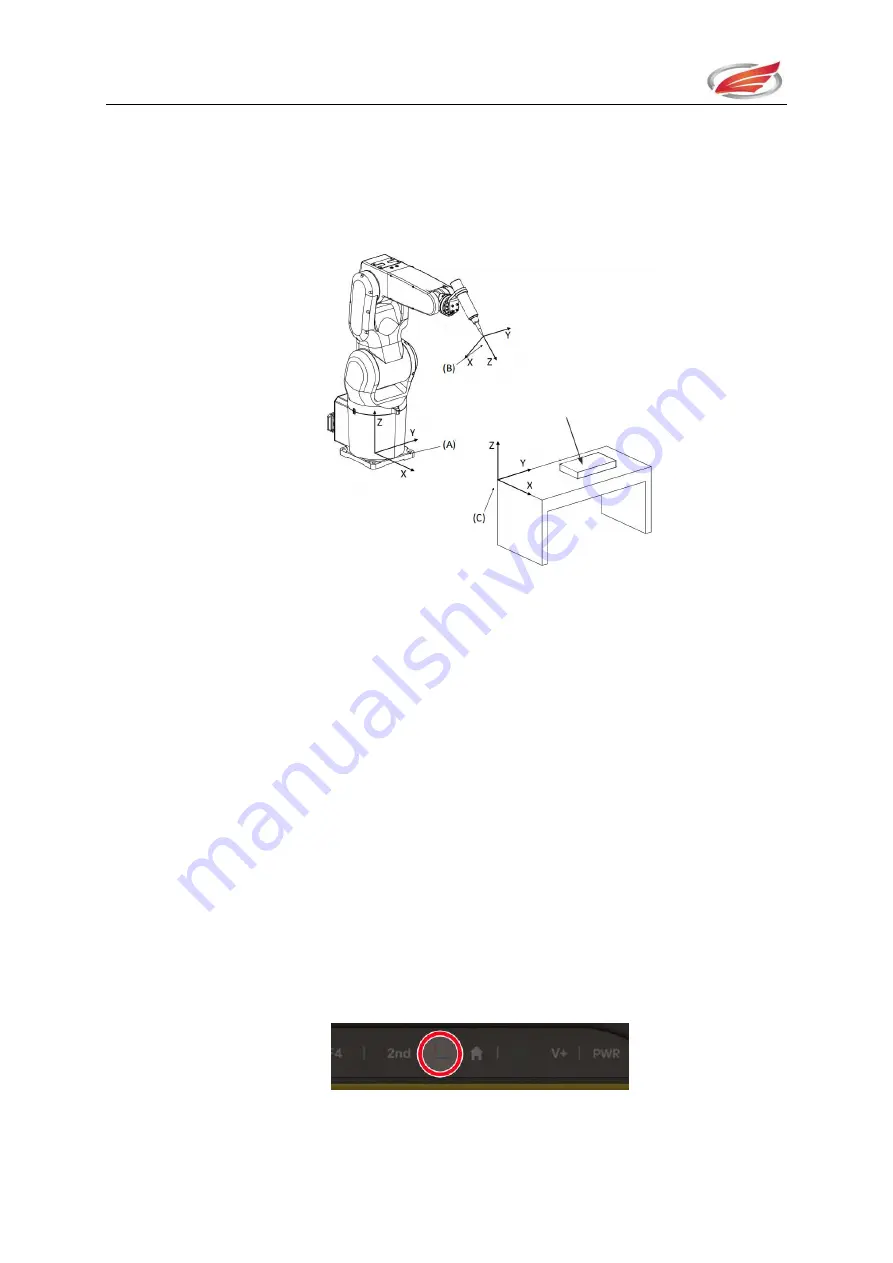
6.2 Coordinate system
The ECR series robots use a right-angle coordinate system (i.e. Cartesian coordinate)
to describe the position and gesture of objects in 3D space. Figure 6-3 below shows
the coordinate system involved in the ECR robot:
Figure 6-3 Coordinate system
a. The original point of robot coordinate (i.e. basic coordinate system) is at the
central point of the robot base.
b. The original point of tool coordinate is at the tip position in the end of the tool.
c. User coordinate system, which mated with the workpiece as a reference
coordinate, is usually not used alone.
6.3 Robot Jogging
Robot jogging means that the robot is operated in manual mode, by the joint way or
the Cartesian way. Chapter 3 has described the basic operating steps about it. In this
section, motioning tab interface is combined with to introduce the robot jogging.
By clicking the coordinate system button on the panel of teaching pendant in
manual mode (as figure 6-4 below), the reference coordinate of motion can be
switched in turn as: the joint coordinate, the robot coordinate, the tool coordinate
and the user coordinate. The corresponding icon of those coordinates shown in HMI
status bar of teaching pendant are refer to table 6-1 as below.
Figure 6-4 The coordinate system button
Workpiece







































































