





























移动
埃夫特智能装备股份有限公司
Jog
EFORT INTELLIGENT EQUIPMENT CO.,LTD
183
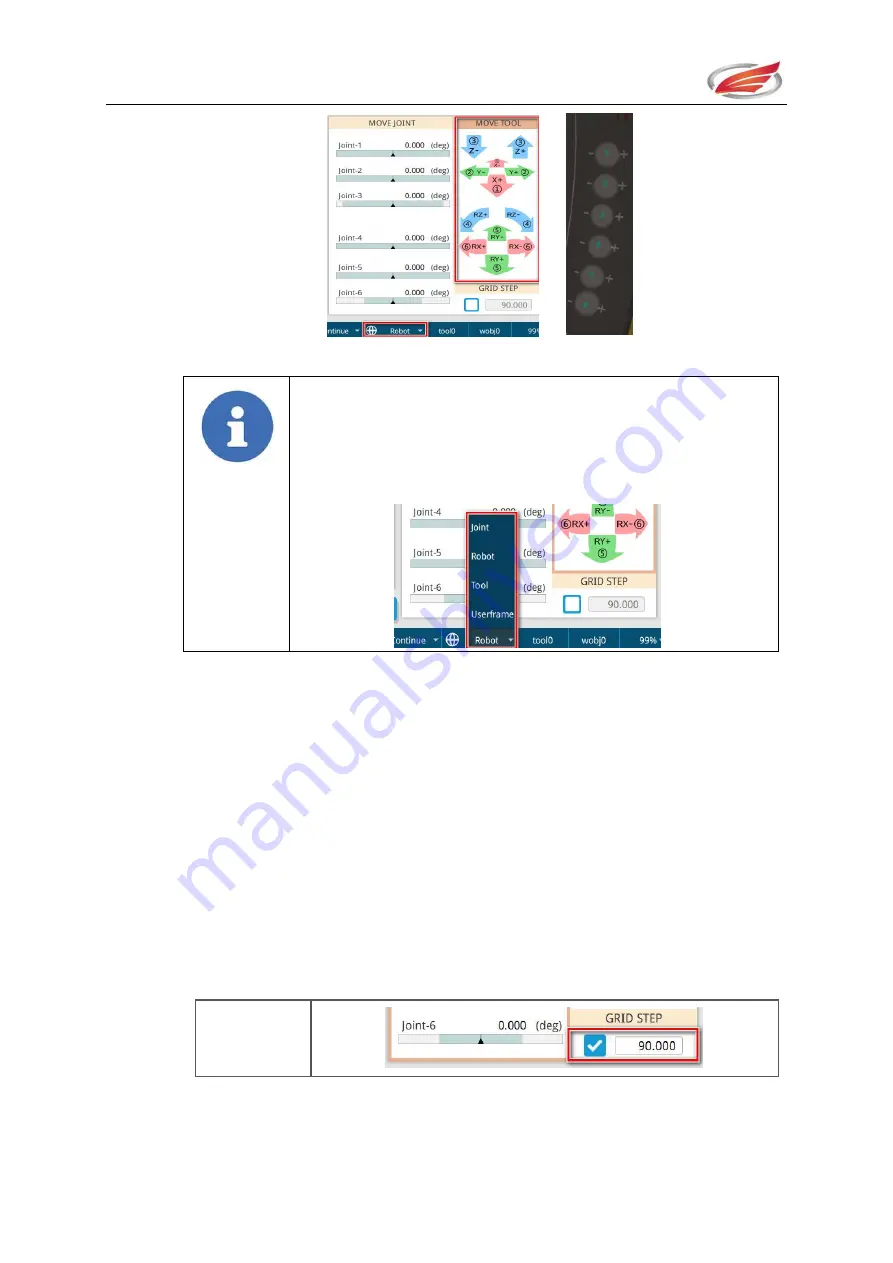
Figure 6-6 Cartesian motion
Notes!
Reference coordinate of motion could be switched directly by clicking the
icon on the status bar.
6.3.3 Step-in motion
When ticking the checkbox "Step-in motion", clicking the control button will firstly
cause the robot move to the integer-fold position of the step-in length closest to the
corresponding direction, and then move on the step-in length by another clicking.
For example, the joint angle of one axis is currently 11.96 degrees, the step-in
length is set to 15 in step-in motion settings. When clicking the control button first
time, joint angle of the axis will vary to 15 degrees which is the closest to 11.96
degrees and at the same time the integer-fold of 15 degrees. And then, each clicking
the button "+" of this axis, will increase the joint angle by 15 degrees.
The following table shows the pre / after step-in motion effects.
Example for step-in motion (In this example, the "+" button of control button 1 is clicked
only once)







































































