


























Mechanical Operations and Maintenance Manual for Industrial Robot ER10-1600
14
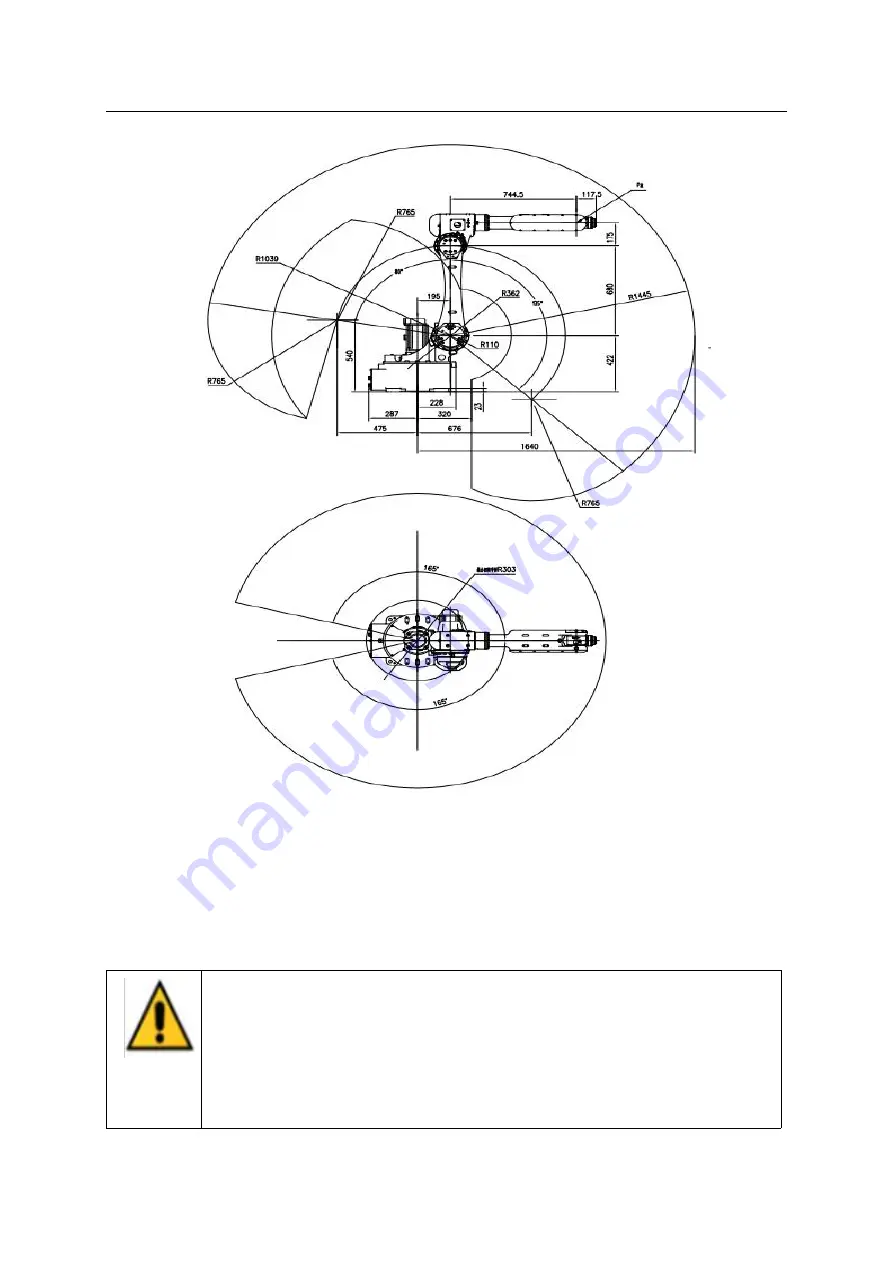
Fig2-5 Robot Workspace Diagram
Note: The working space shown in this figure is the theoretical maximum reachable range of point p.
It will change due to the influence of the installation method in actual operation. In actual use, please
consider the influence of the installation method on the working space.
2.7 Allowable Value of Wrist Payload
Attention
The installation payload at the front end of the robot wrist is affected by the
allowable weight of the wrist, the allowable payload torque value, and the allowable
moment of inertia. The allowable payload torque value changes according to the
actual payload moment of inertia.The wrist payload should be strictly controlled
within each allowable value.When using the robot with a wrist payload other than
the allowable value, normal operation cannot be guaranteed.







































































