


























Mechanical Operations and Maintenance Manual for Industrial Robot ER10-1600
16
Chapter Three Handling and Installation
3.1 Robot Handling
3.1.1 Handling Precautions
The following are precautions for robot handling operations. Please work safely after fully
understanding the following:
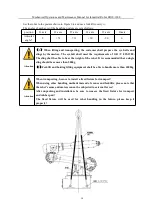
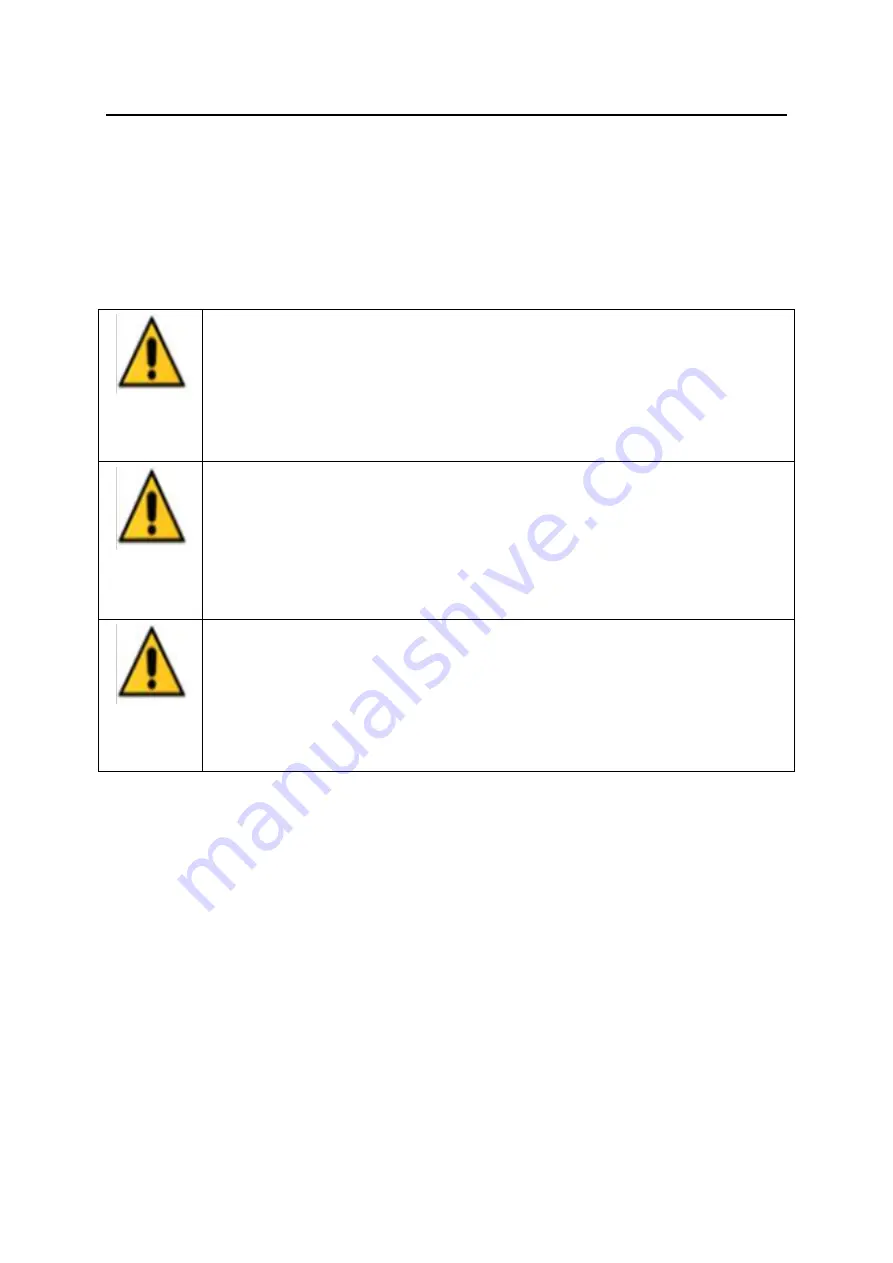
Attention
The handling of robots and control devices must be carried out by qualified personnel
for hook, lifting operation, forklift, etc. Carrying operations by operators who do not
have the correct skills may cause accidents such as tipping and falling.
Attention
When transporting the robot and control device, please follow the method described
in the manual and confirm the weight and steps before proceeding.
If the operation cannot be performed in accordance with the specified method, the
robot and the control device may tip over or fall during the handling process,
resulting in accidents.
Attention
When carrying out transportation and installation operations, care should be taken to
avoid damaging the wiring. In addition, after the device is assembled, protective
measures such as covering the protective cover should be taken to avoid damage to
the wiring by operators and forklifts.
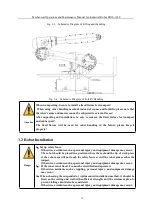
3.1.2 Auxiliary Handling Tooling
Before the robot is transported, the wrist body part needs to be fixed to prevent the shaking and
collision of the wrist body from causing damage to the robot. Generally, a packing fixing bracket is used to
connect the wrist body and the swivel part.

































































