



























Mechanical Operations and Maintenance Manual for Industrial Robot ER10-1600
17
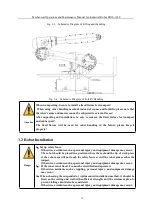
Fig.3-1 Packing and Fixing Bracket Installation Diagram
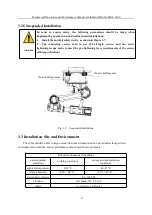
If you choose a forklift to carry the robot, you need to observe whether there are fork foot position
near the base of the robot.The base of the ER10-1600 robot has no fork feet, and external fork feet need to
be installed to assist forklift handling. After handling, remove the fork foot in time to avoid interference
with the movement of the robot.
Fig. 3-2 Fork Foot Installation Diagram
3.1.3 Handling Method
1
)
Handling method one
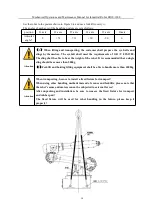
When transporting the robot, first set up the robot according to the posture shown in Figure 3-3, and
then install four M10 eyebolts on the main frame, and use 4 steel cables for lifting.
Note: In Figure 3-3, no other devices are installed on the end effector and robotic arm, so please pay
more attention once you install other devices.
2
)
Handling method two
Full thread M12
×
60


































































