






















Mechanical Operations and Maintenance Manual for Industrial Robot ER10-1600
36
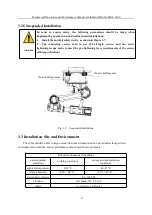
Fig.4-5 Robot Home Position Map
4.7 Battery Replacement
The home position data of each axis of the robot is saved by the encoder battery. Every 7860 hours or 2
years of operation (whichever is shorter), the battery should be replaced in time. The process is as follows:
Adjust the robot to the state of calibration (zero position of each axis). To prevent danger, turn off the
power supply, hydraulic pressure source and air pressure source connected to the robot.
Remove the rear cover of the robot base and remove the battery pack, as shown in Figure 4-6.
Remove the old battery from the battery box and put the new battery into the battery box, paying
attention to the positive and negative polarity of the battery. Reconnect the battery cable and fix the battery
pack.
After installation, follow the steps to fix the rear cover of the base.
After ensuring that all safety conditions are met, perform the zero point re-recording of the robot and the
verification test of the related zero point accuracy. For detailed steps, see the zero calibration chapter in the
"EFORT Industrial Robot Operation Manual".
Fig. 4-6 Robot Battery Pack Location Map
4
3
5
6
J4 home
position
J5 home
position
J6 home
position
J3 home
position
battery pack
the rear cover of the robot base







































































