




























ER15-4-1600 Quick Operation Manual for Industrial Robot
第
20
页
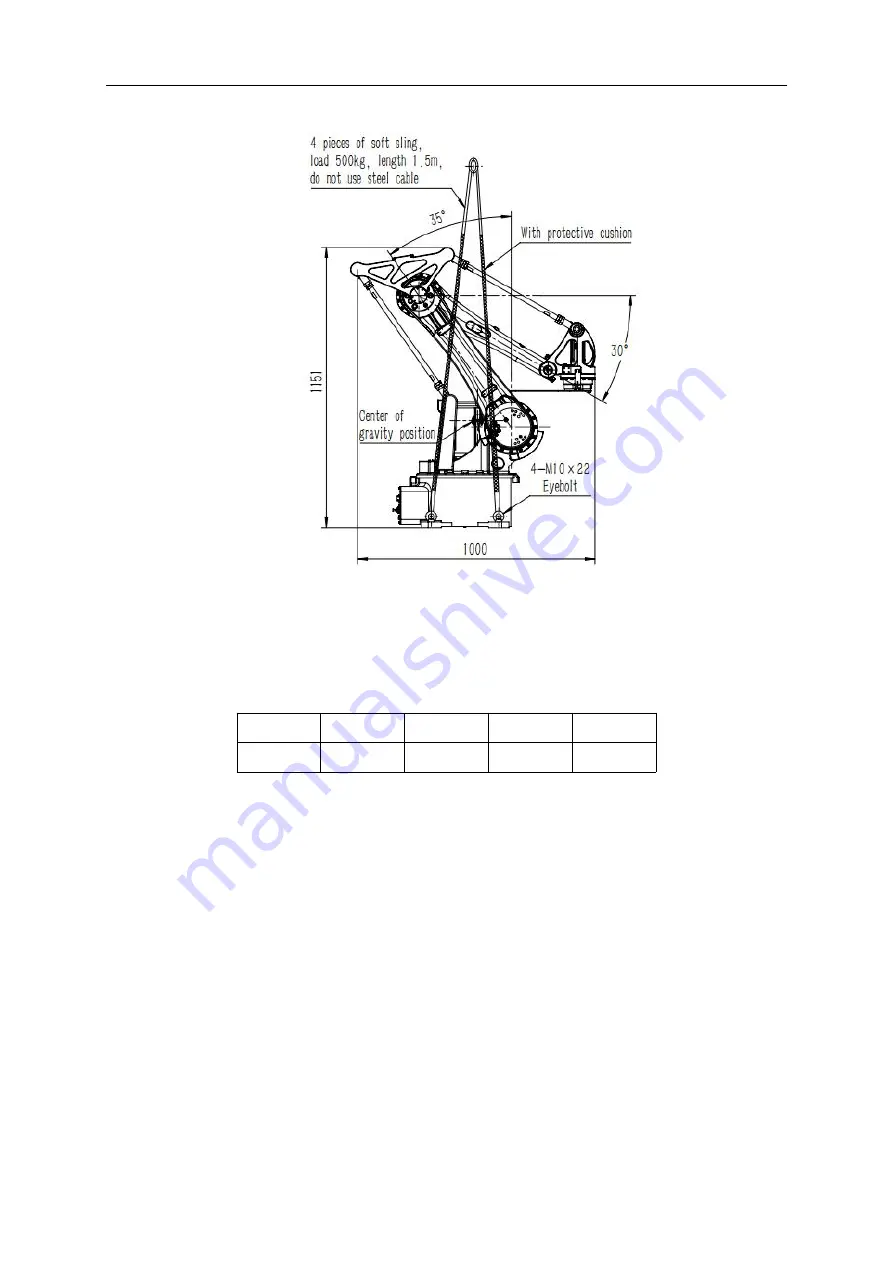
Figure 2-3 Schematic diagram of lifting and transportation
Note: In Figure 2-3, no other devices are installed on the end effector and the robotic arm, so
once you install other devices, please pay more attention.
2) Method 2
Set the robot to the posture shown in Figure 2-4 and use a forklift to carry it.
The angle of each axis of the transport posture is set as follows
:
Position
Axis 1
Axis 2
Axis 3
Axis 4
Joint
0°
+35°
-65°
0°
Note: Before the robot runs, please remove the fork feet





































































