



























Mechanical Operation and Maintenance Manual for ER180-4-3200 Industrial Robot
15
Chapter Three Handling and Installation
3.1 Handling the Robot
3.1.1
Precautions
Please read the following precautions carefully before handling the robot
Attention
The handling must be performed by a professional with lifting and forklifting work
qualifications. Unprofessional performance might lead to flipping or falling
accidents.
Attention
Please follow the procedures described in the manual and check whether the weight
of the robot and the control cabinet exceeds the maximum lifting load before
handling the robot. Operations that do not follow these procedures might lead to
flipping or falling accidents.
Attention
Please protect the cables when handling the robot and the control cabinet. Besides,
the cables should be covered by a shield to prevent from accidental damage.
3.1.2 Handling Method
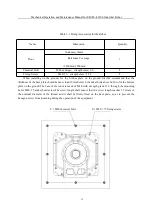
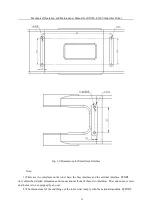
Position the robot as shown in figure 3-1. Lift the robot body from its previous carrier (the total
allowable weight is greater than the weight of the robot body). Rubber hoses should be placed on the cables
to prevent from direct contact with the robot body. During hoisting, the angle of each axis should be
adjusted to the value given in the table below, so as to ensure that the center of gravity is in the middle,
which is convenient for hoisting. When lifting, please hold the robot upright to avoid tilting.
Note: Neither the end effector nor the robot arm has any tool. Caution is advised if a tool is installed to
the end effector or robot arm. Adjust the robot position with the parameters shown in the following table.




































































