





























Mechanical Operation and Maintenance Manual for ER20-1100 Industrial Robot
15
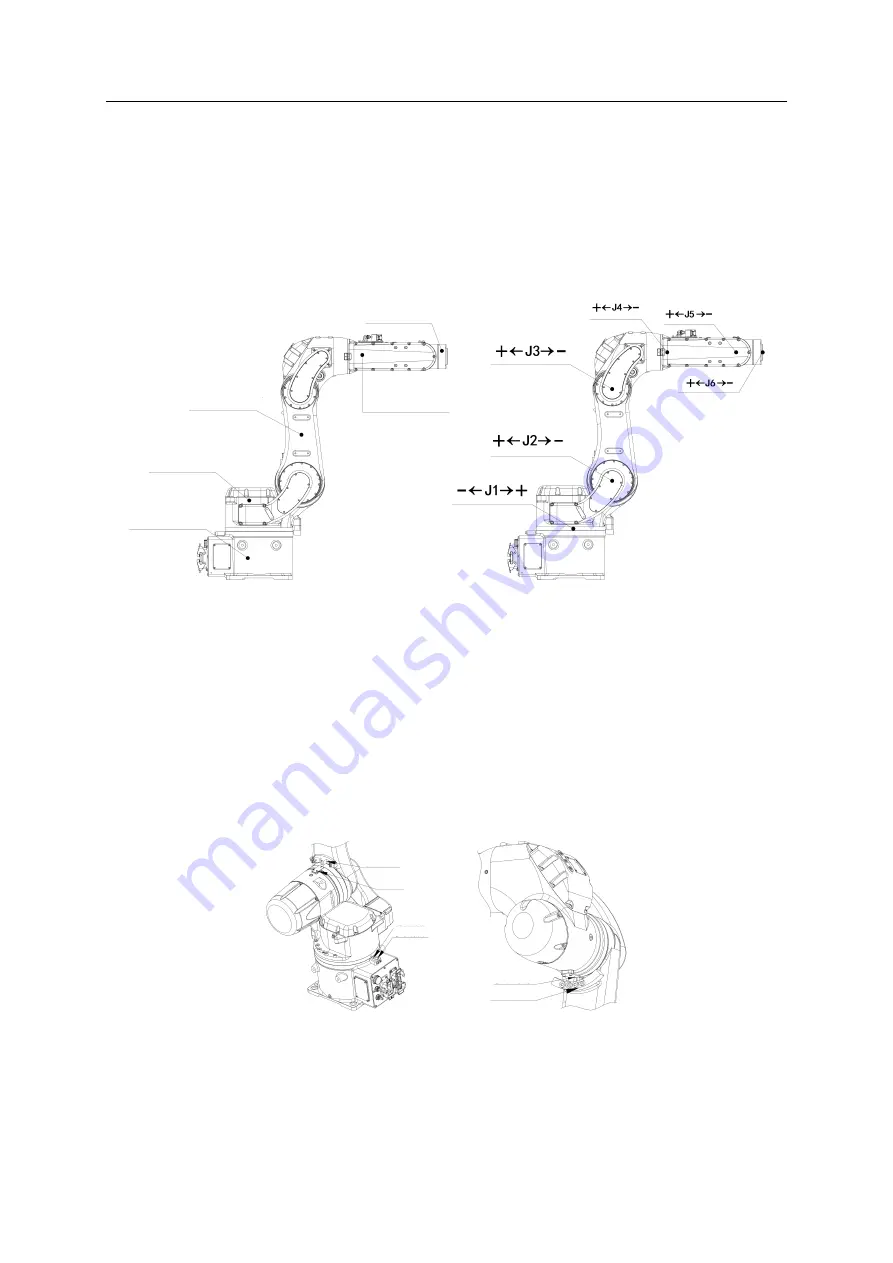
2.4 Body composition and direction identification of Each Axis
The mechanical body mainly includes base, rotating part, upper arm, forearm, wrist. The
joints are driven by the servo motor, each of which cooperate to achieve position and gesture
adjustment of the robot end in space. Names of each part and direction director of each axis
are shown at as follows.
Figure 2-3 Mechanical composition of ER20 - 1100 body
2.5 Range limit and home position of each axis
Each axis of the body sets a home position and range limit. When the system is in normal
operation, each axis is controlled to move within the allowable range. To further ensure safety,
some axes are equipped with mechanical end stops (shown as follows) to prevent malfunction
of the control device and operation beyond motion range.
Wrist
Forearm
Upper arm
Rotating part
Body base
Mechanical end stop
of axis J2
Home position
of axis J2
Home position of axis J1
Mechanical end stop of axis J1
Home position of axis J3
Mechanical end stop of axis J3







































































