





























Mechanical Operation and Maintenance Manual for ER20-1100 Industrial Robot
18
2.7.1 Maximum carrying weight
Robot model
Maximum carrying weight
ER20-1100
20 kg
2.7.2 Maximum static payload torque
Robot model
Maximum static payload torque
Axis J4 rotation
Axis J5 rotation
Axis J6 rotation
ER20-1100
42 N.m
42 N.m
20N.m
2.7.3 Maximum moment of inertia
Robot model
Maximum moment of inertia
Axis J4 rotation
Axis J5 rotation
Axis J6 rotation
ER20-1100
2 kg.m2
2 kg.m2
0.7 kg.m2
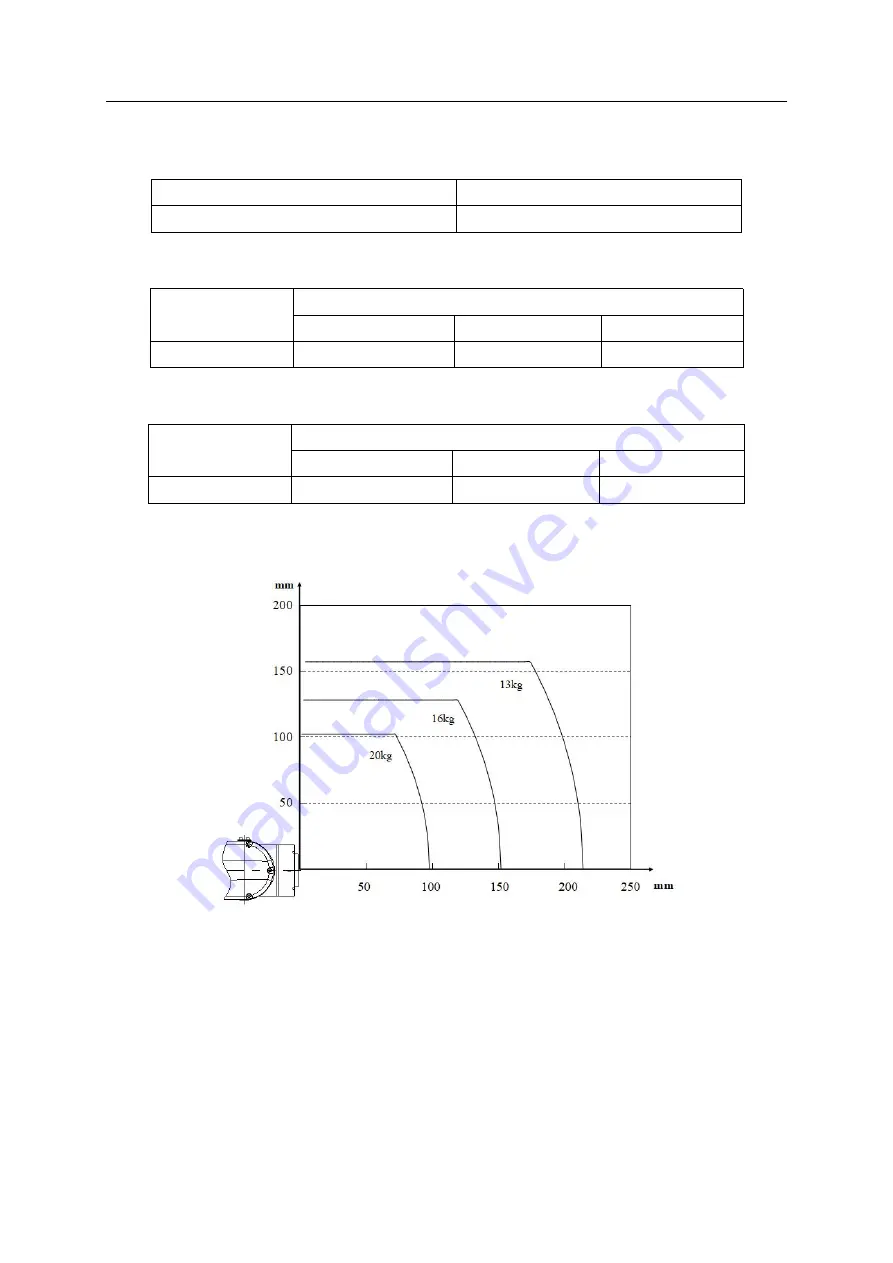
2.7.4 Allowable payload curve diagram
Figure 2-6 Axis torque curve of wrist




































































