





























Mechanical Operation and Maintenance Manual for ER20-1100 Industrial Robot
19
Chapter 3 Transportation and installation
3.1 Robot transportation
3.1.1 Transportation precautions
See below for transportation precautions. Please fully understand the following content,
and then operate safely.
Transporting robot and control devices must be performed by qualified personnel for
hooking, lifting and forklift, etc. Operators without right skills may cause accidents, such
as tipping and falling.
Please follow the methods recorded in the manual and confirm the weight and procedures
before transporting the robot and control devices. Or accidents, such as tipping or falling
may occur.
Attention should be paid to avoiding the damage of wiring in transporting and installation.
Additionally, protective measures, such as cover the protective shield, should be taken after
the installation to avoid the damage of wiring by operators and forklifts.
3.1.2 Auxiliary handling tooling
Before handling the robot, the robot needs to fix the body part of wrist to prevent the
robot damage from its shaking and collision. A packaging fixation bracket is generally used to
connect the body of wrist and the transposition part.
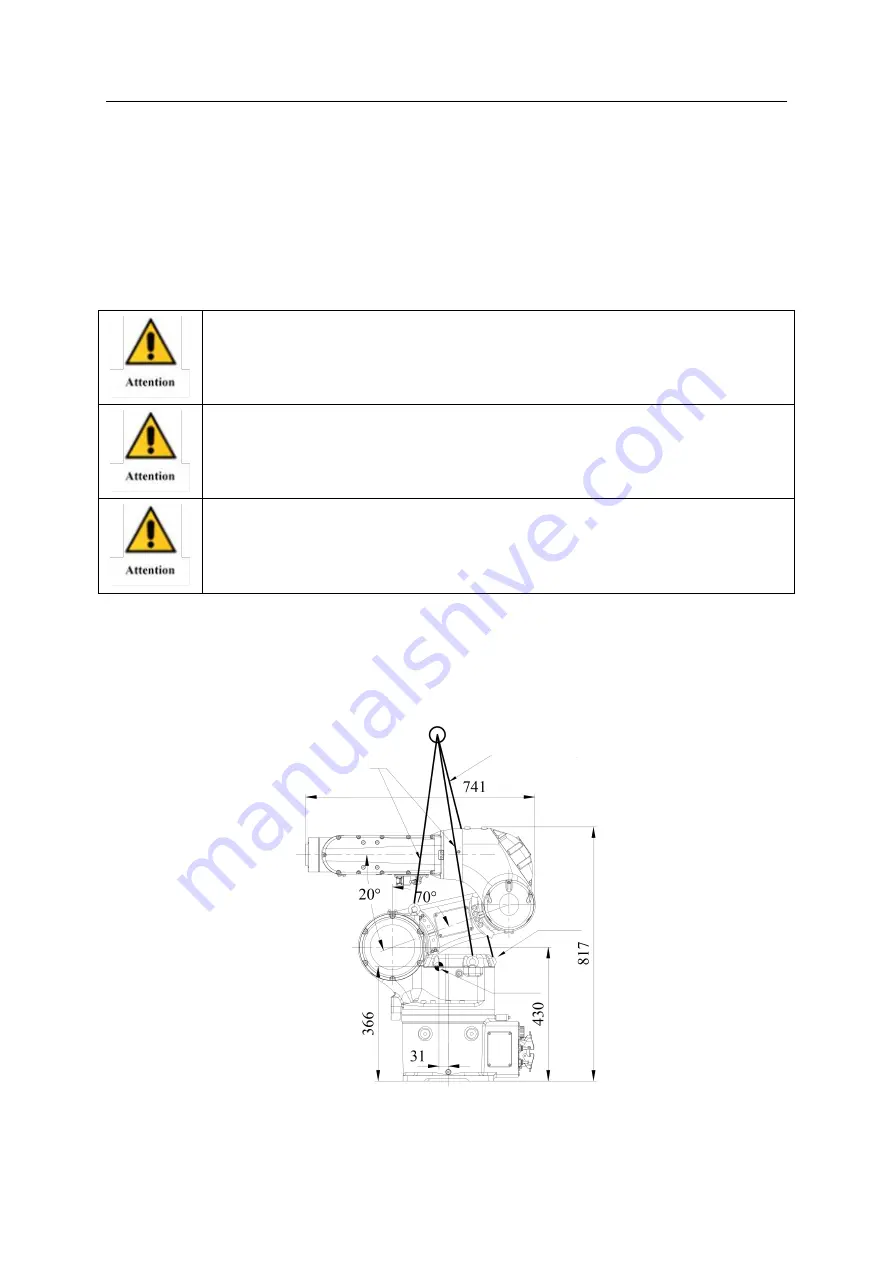
Figure 3-1 Installation schematic of packing and fixing bracket
2 meters length 500kg-load
soft lifting belt × 4
(Do not use steel cable)
Protective soft-pads shall be
added in the part that
contacting with the robot body
lifting ring
screw
M12 × 3
Position of
barycentre
































































