




















Mechanical Operation and Maintenance Manual for ER20-1100 Industrial Robot
38
4.6.2 Mechanical calibration of axis home position
When re-calibrating the mechanical home positions for each axis of the robot, operate
the robot in jogging mode to have each axis motion to the home position mark. And then enter
the interface of home position information in teaching pendant, to record the coordinates of
each axis. The detailed calibrating methods of home position can also refer to the Robot
Operation Manual for ER Series provided by our company.
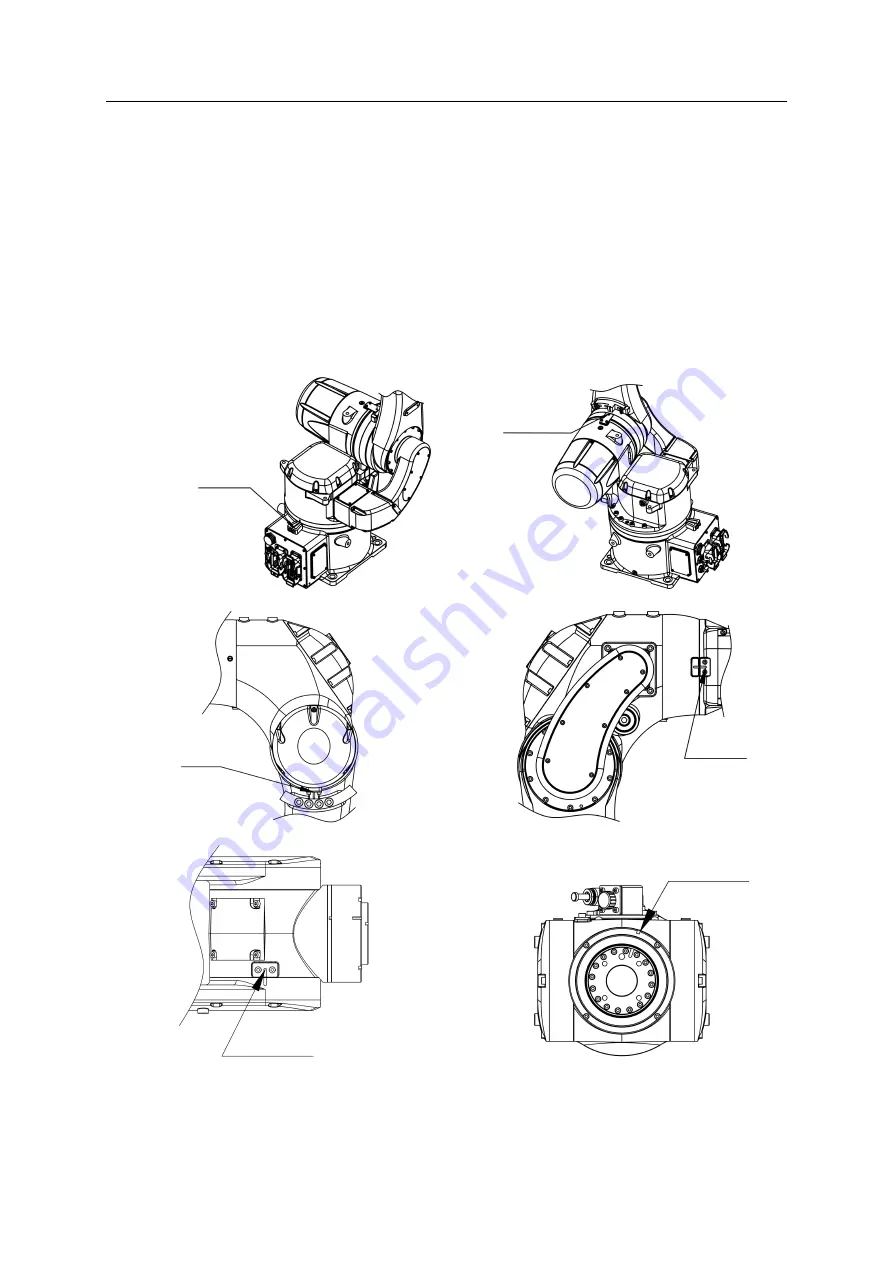
Home position of each axis is spread as follows:
Figure 4-4 Home position of robot’s axes
Home position of axis J1
Home position of axis J2
Home position of axis J3
Home position of axis J4
Home position of axis J5
Home position of axis J6






































































