






















Mechanical Operation and Maintenance Manual for ER20-1700 Industrial Robot
37
4.6.2 Mechanical Zero Position Calibration of Each Axis
When re-calibrating the mechanical zero position for each axis of the robot, operate the robot in jog
mode to enable each axis run to the zero position mark, and then enter the zero position information
interface of the teach box to record the coordinates of each axis. See the Robot Operation manual for C30
Series provided by our company for detailed zero position calibration methods.
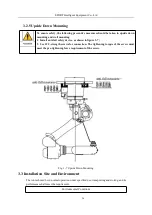
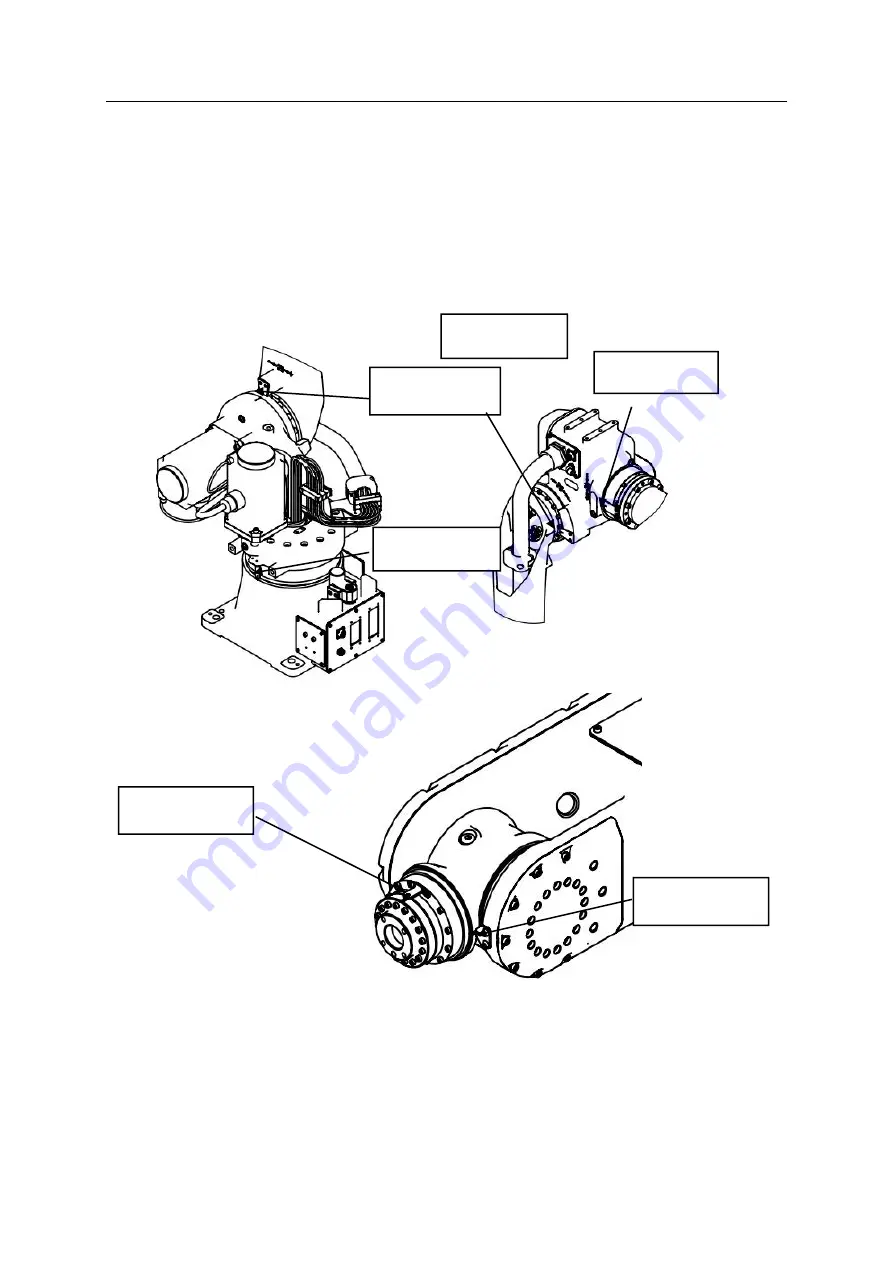
Zero position of each axis is spread as follows:
Fig.4-5 Zero Positions
4.7 Battery Replacement
The data regarding zero positions of each axis is saved by the encoder battery, which needs to be
replaced every 7860 operation hours or two years (whichever is shorter). See below for procedures:
2
4
3
5
6
J2 zero position
J1 zero position
J6 zero position
J5 zero position
J3 zero position
J4 zero position





































































