




























Quick Operation Manual for ER3-600 Industrial Robot (EC2-S electric cabinet)
21
3.2 Robot Power Cable, Signal Cable and Ground Wire
A standard delivery should include the robot power cable, signal cable and ground wire cables and the
connection between the robot body and the control cabinet can be completed upon request.
Cable Type
Remarks
Robot power cable
Transfer the driving power from the driving device in the control cabinet to
the robot motor.
Robot signal cable
Transfer the data from the encoder to the serial measurement circuit of the
driver.
Robot ground wire cable
Connect the robot body and the control cabinet.
3.3 Definition of Controller Local IO
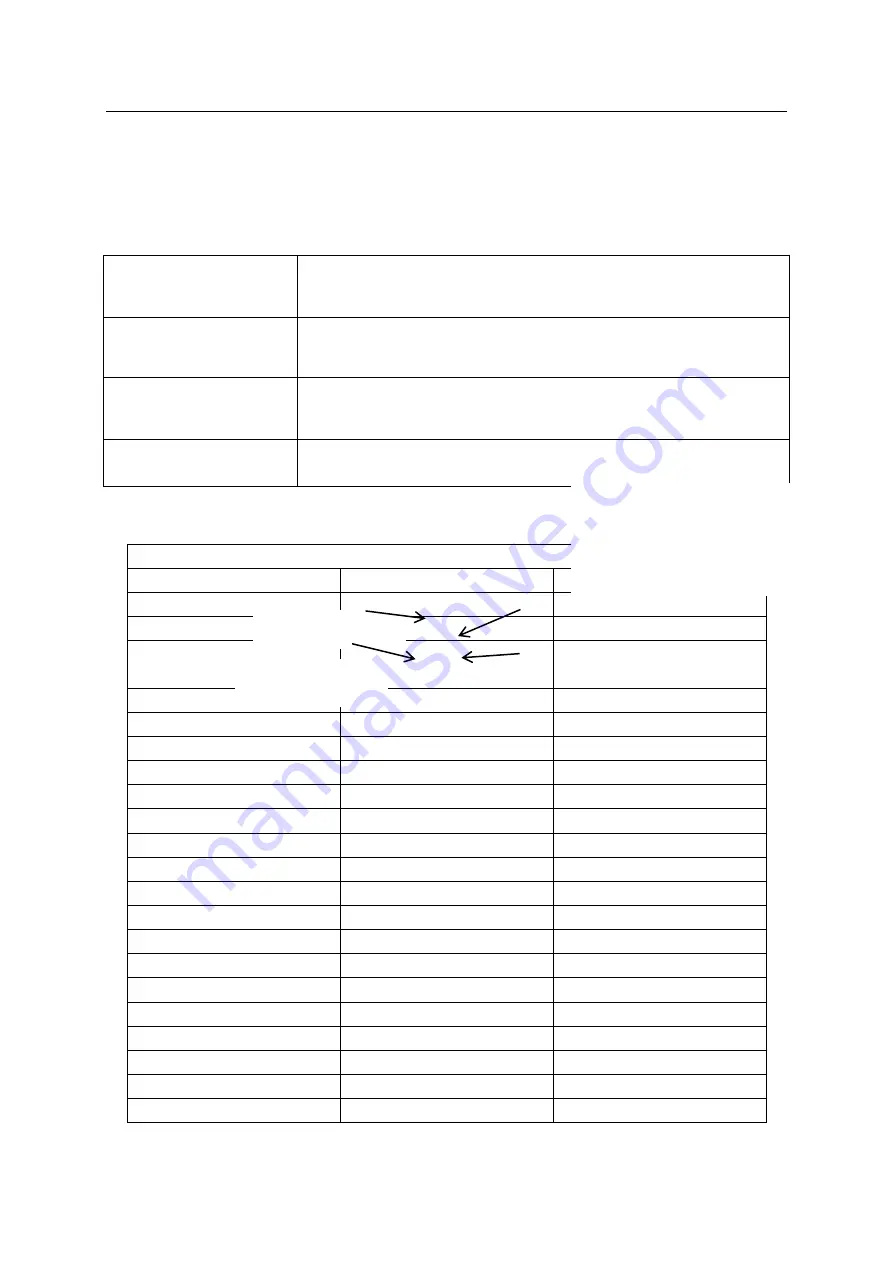
Table 3-1 Output Ports Description
Output
IO Sequence of Teach Pendant
External Terminal Sequence
Remarks
DO0
\
system occupied
DO1
\
system occupied
DO2
\
Servo confirmed
(
system
occupied
)
DO3
\
system occupied
DO4
\
system occupied
DO5
\
system occupied
DO6
\
system occupied
DO7
\
system occupied
DO8
27
user-defined
DO9
28
user-defined
DO10
29
user-defined
DO11
30
user-defined
DO12
31
user-defined
DO13
32
user-defined
DO14
33
user-defined
DO15
34
user-defined
DO16
35
user-defined
DO17
36
user-defined
DO18
37
user-defined
DO19
38
user-defined
DO20
39
user-defined
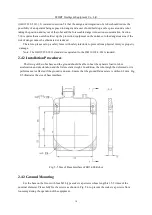
X20 power circular socket
X30encoder signal cable circular socket
PE ground wiring screw
Cable glands*4
Reserved ports *2
Summary of Contents for ER3-600
Page 2: ......
Page 4: ......
Page 54: ...EFORT Intelligent Equipment Co Ltd 48 Fig 4 10 Main Power Switch...







































































