

















EFORT INTELLIGENT EQUIPMENT CO., LTD
34
Appendix
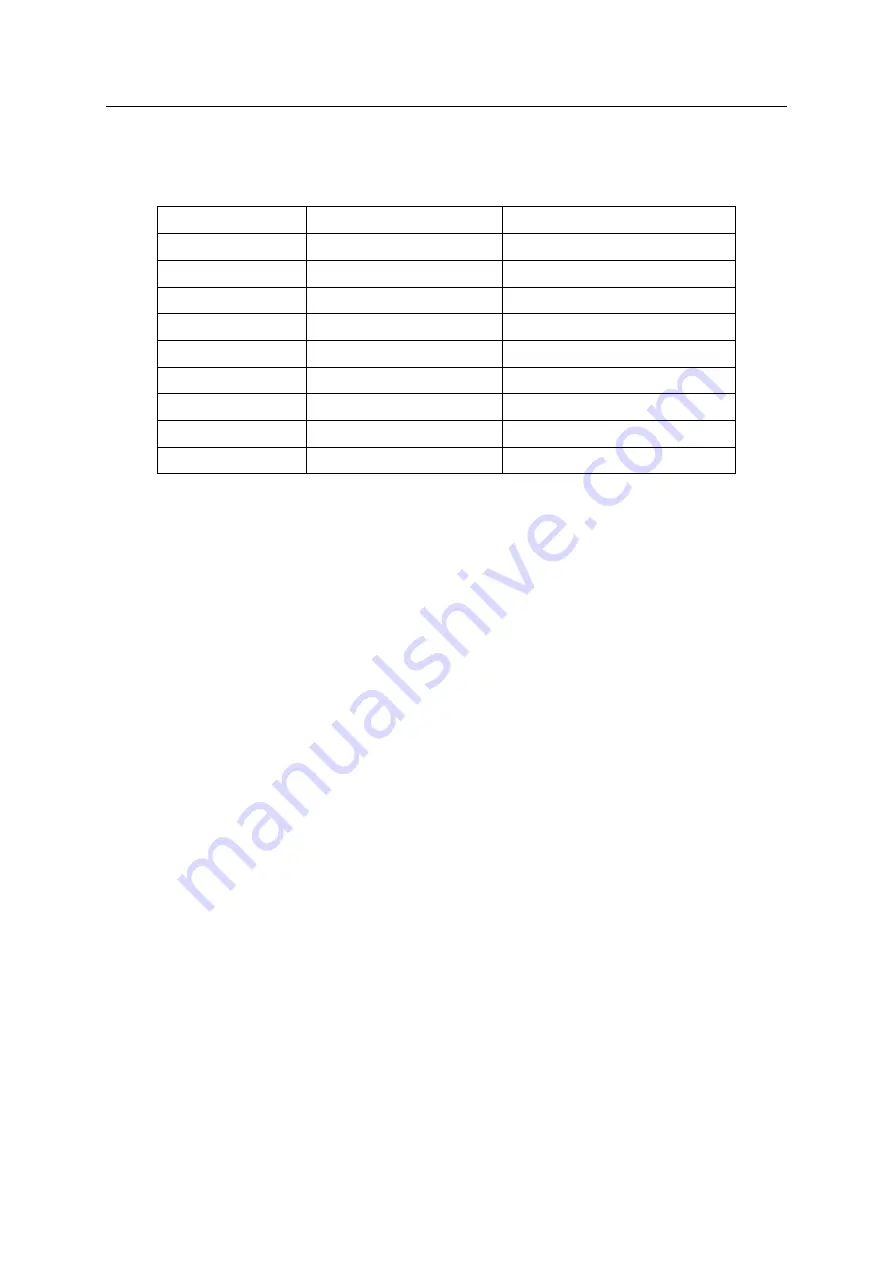
A Screw tightening torque table
Note:Due to the special tightening torque of the motor flange material, please refer to the notes in the table
to apply
Screw 12.9
Tightening torque (cast iron) Tightening torque (cast aluminum)
M3
2±0.18
2±0.18
M4
4.5±0.33
4±0.33
M5
9.01±0.49
7.35±0.49
M6
15.6±0.78
12.4±0.78
M8
37.2±1.86
30.4±1.86
M10
73.5±3.43
59.8±3.43
M12
128.4±6.37
104±6.37
M14
204.8±10.2
180±10.2
M16
318.5±15.9
259±15.9







































































