





























EFORT INTELLIGENT EQUIPMENT CO., LTD
10
2.5
Hard limit of each axis of mechanical body
Each axis of the robot body is provided with a zero mark and a permitted range of motion. When
the robot system runs normally, each axis of the robot is controlled to operate within the allowable
range. In addition, in order to further ensure safety, a mechanical hard limit device (see Figure 2-4) is
also provided on some axes to prevent the robot (control) system from operating abnormally when the
robot runs beyond the allowable range.
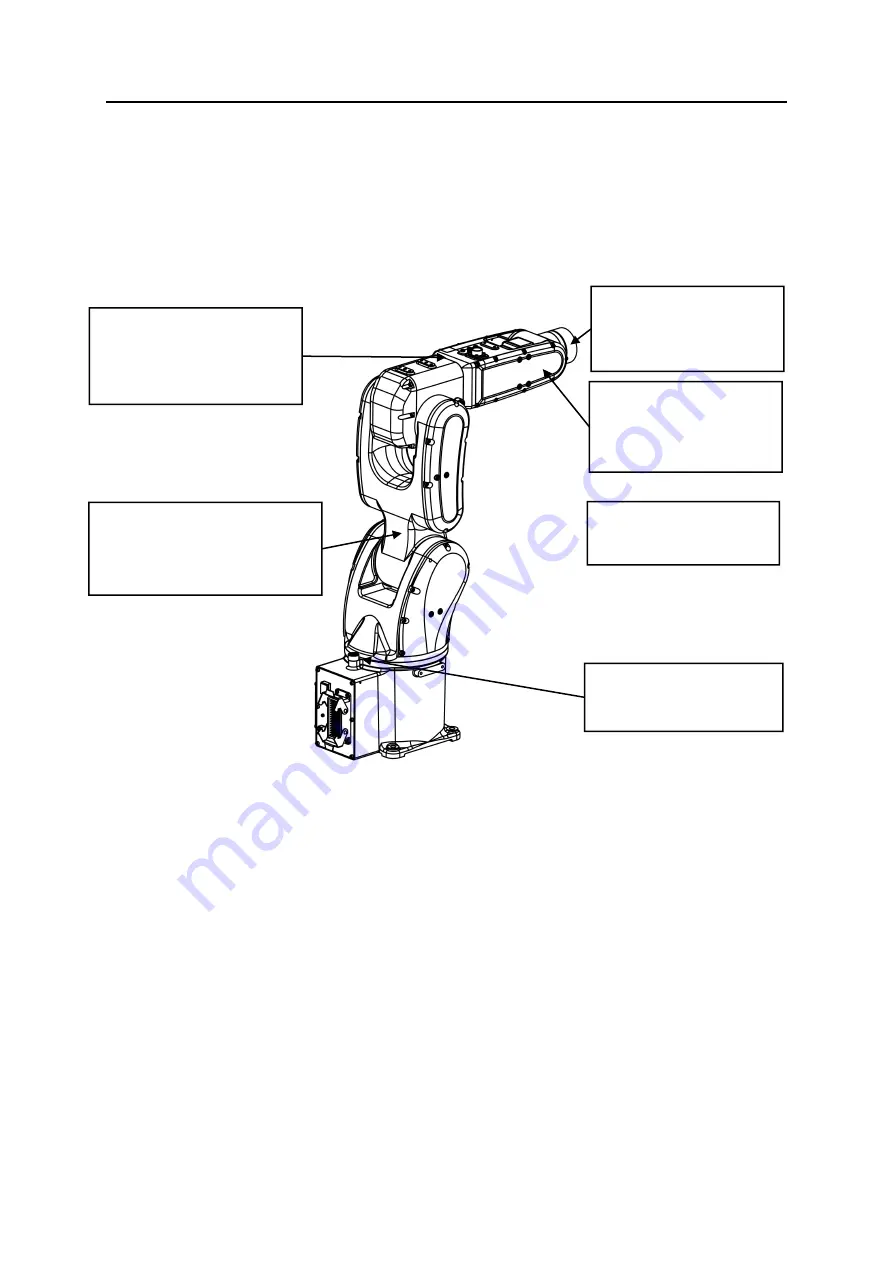
Figure 2-4 Mechanical hard limit position and zero mark position
J2 axis depends on casting contact
limit
J3 axis limit block
J4 axis infinite position device,
set by software to control the
range of motion
J5 axis relies on casting to
contact the limit block
J
6 axis infinite position
device
J1 axis limit block







































































