





























ER7-700 Industrial Robot Mechanical Use and Maintenance Manual
11
2.6
Robot performance parameters
1) Robot performance parameter table
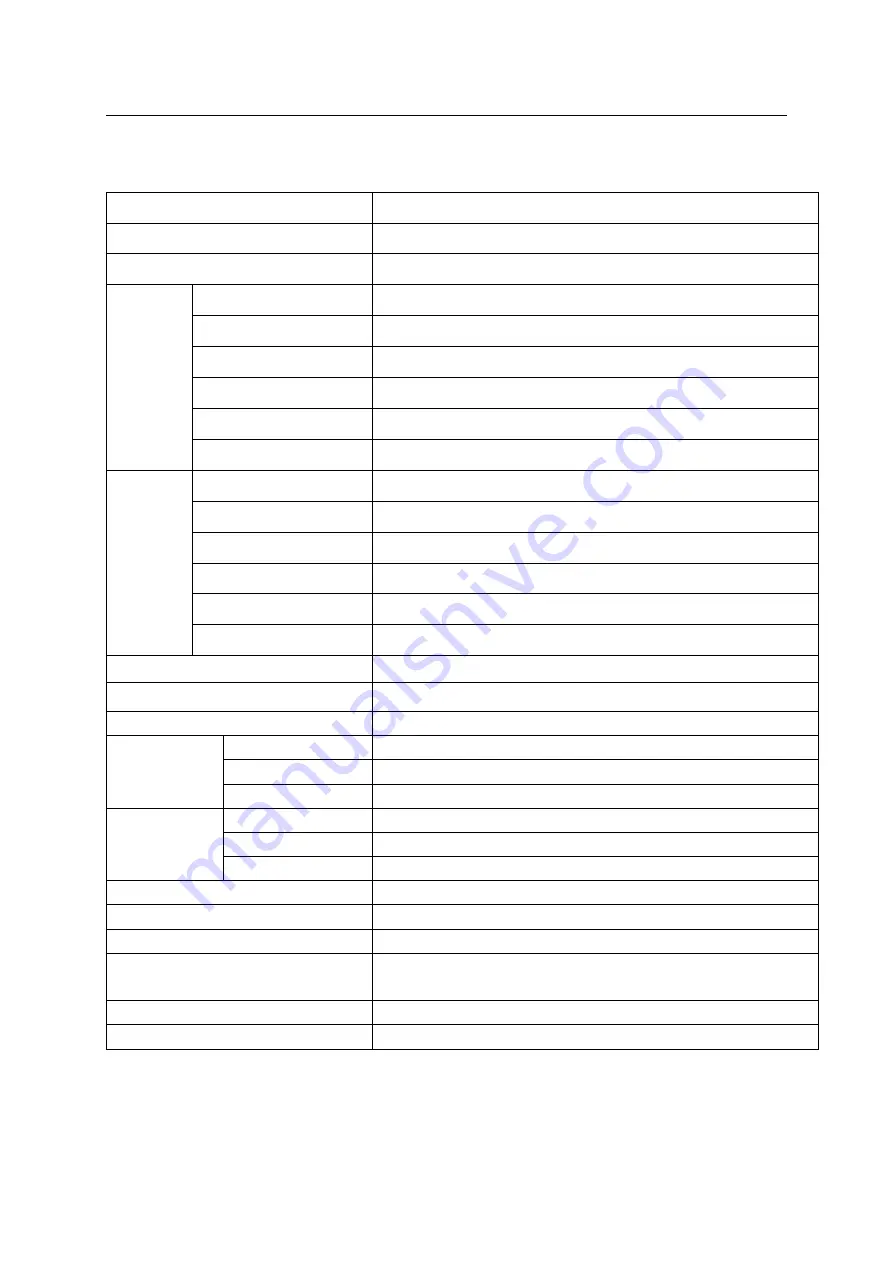
model
ER7-700
Control axis
6 axis
placement method
Ground installation, suspension installation
Maximum
operating
speed
J1 axis
380°/sec
J2 axis
350°/sec
J3 axis
400°/sec
J4 axis
450°/sec
J5 axis
450°/sec
J6 axis
720°/sec
Maximum
motion
range
J1 axis
±170°
J2 axis
+80°~-135°
J3 axis
-70°~+195°
J4 axis
±190°
J5 axis
±120°
J6 axis
±360°
Maximum radius of activity
713mm
Hand load
7Kg
Body weight
38Kg
Wrist allows
maximum static
torque
J4
16Nm
J5
16Nm
J6
9Nm
Allowable
maximum
inertia of wrist
J4
0.45Kg*m2
J5
0.45Kg*m2
J6
0.14Kg*m2
Repeat accuracy
±0.02mm
Robot base size
200*200mm
Ambient temperature
0-45°C
Relative humidity
Working conditions 80% (40 ° C) Storage and transportation
conditions 93% (40 ° C)
Atmospheric pressure
86KPa~106KPa
Vibration, impact, collision
≤0.5G




































































