





























SOI/DT 2006-01 dmm
47/71
599 37 47-13
5.9 Induction
motors
(asynchronous)
5.9.1 General
characteristics
The function of the motor is to rotate the drum at different speeds:
Ö
high speed for the spin phases
Ö
low speed for the wash phases
The primary characteristic of these motors is that they do not require a start-up current. Instead, the current
in the rotor builds up by induction, hence the name "induction" motor. These motors are also termed
"asynchronous" because the speed of rotation is not the same as the synchronization speed.
5.9.2 Operating
principle
The three-phase asynchronous motors consist of a stator on which the solenoids are winded (windings
impregnated with resins which guarantee an optimal water protection) which are the polar expansions.
These are always a three-multiple number.
Inside the stator, there is an integral rotor to the shaft made up of a group of magnetic blades including also
(normally die-cast aluminium) a circuit called
squirrel cage,
because it consists of a series of bars forming a
cylinder between two rings
.
When the stator generates a rotating magnetic field, electrical currents are inducted into the cage. These,
opposing to the generator field, produce a twisting movement to the rotor.
The maximum rotation per minute of an asynchronous motor depends on the power frequency and on the
number of polar couples.
The three-phase motors are highly efficient due to the absence of brushes. They can be powered also with
inverter circuits, starting from a direct current power source.
The stator windings can be connected by
star
or by
triangle
.
The electrical components must be serviced by qualified personnel only.
Unplug the appliance before accessing internal components.
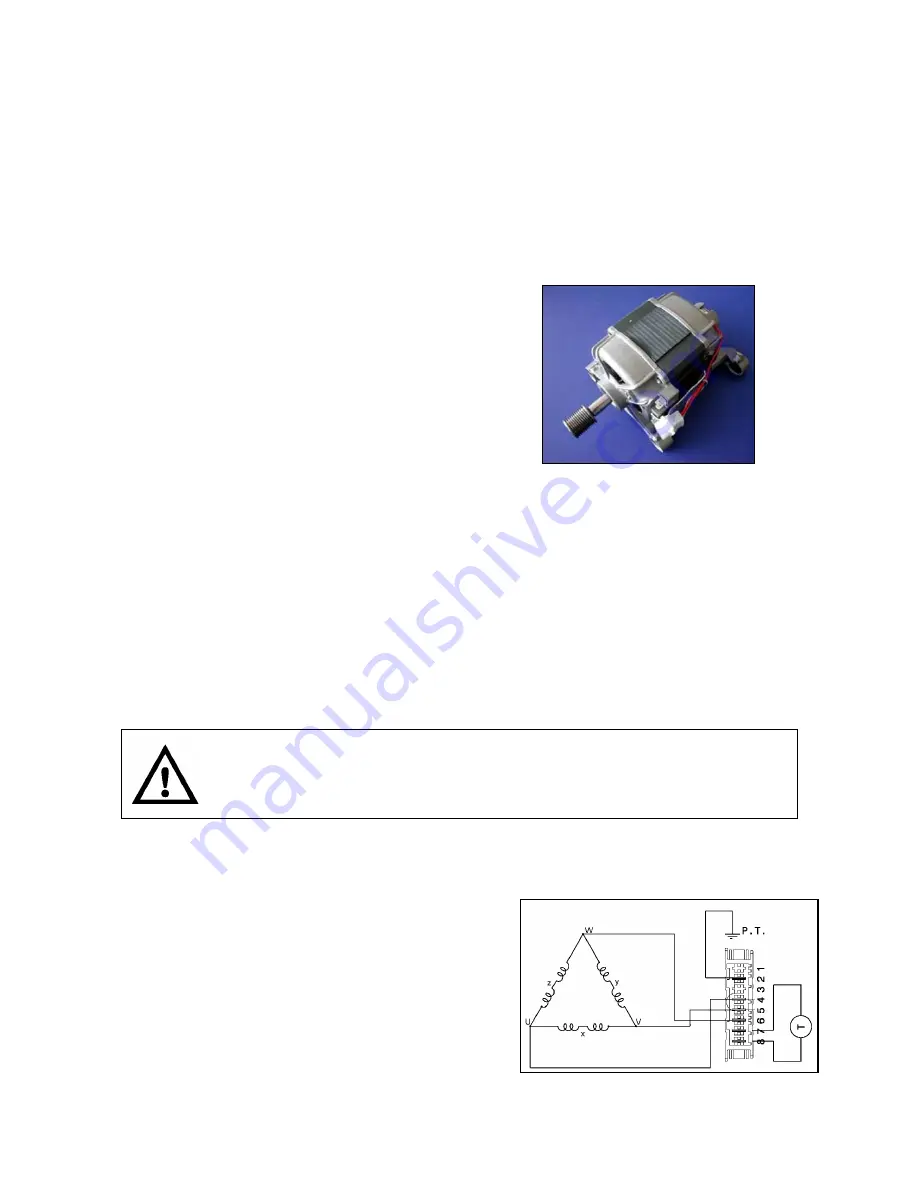
5.9.3 Checking the efficiency
It is possible to have an indication of the
efficiency of the motor by measuring the
windings resistances:
Winding y ohm 5,4
∼
±7% (contacts 5-6)
Winding x ohm 5,4
∼
±7% (contacts 4-5)
Winding z ohm 5,4
∼
±7% (contacts 4-6)
Winding T (tachometric) ohm 121
∼
±7%
(contacts 7-8))







































































