



























26
Ⅱ
.
T
e
c
h
n
ic
a
l D
a
ta
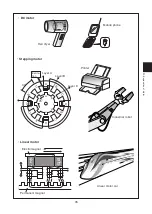
SPIN SHOOTER uses the “gear mechanism,” which transmits the rotational power from the
motor to the legs and rotors. Gears are used for many devices around you. They have not
only the function to transmit the power but other important roles. Here are various functions of
the gears.
・
Changing the direction of rotation
The first role of the gears is changing the direction of rotation. Between the two connected
gears, when the first gear rotates clockwise, the next gear rotates counterclockwise. In
case of the pinion gear on the motor and the crown gear installed in this robot, the rotational
axis changes to 90 degrees. The gears change the direction of the rotation and axis to
make desireable mechanisms for the robot.
・
Changing the rotating speed
The gears can change the rotating speed. When the first gear with 10 teeth is engaged
with the 40 teeth gear, a complete rotation of the first gear will make the next gear rotate on-
ly 10 teeth, which is one-fourth of a complete rotation. This means that the rotating speed has
been reduced to one-fourth. A motor spins thousands of times per minute, however, it is too
fast to move the legs. By combining the gears, the rotating speed becomes slower and
easier to control.
・
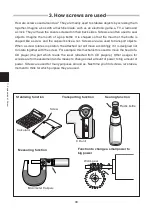
Changing the torque
The gears change the rotating power called
torque
. The motors used for this robot have on-
ly small power and cannot move the legs. Then, how does the robot gain more power?
Let’s see the engagement of a small pinion gear and a flat spur gear with pinion, for in-
stance. The small pinion transfers the torque to larger gear at the Point A where they are en-
gaged. Supposing that gears work as a lever, when the power is applied on the point (A),
which is far from the center of the flat gear (Fulcrum), Point B will obtain larger power than
the power on Point A. By using this principle, the robot achieves enough power to run the
legs.
The torque is related to the rotating speed. When the gear combination is changed under the
condition that the motor runs with the same speed: The faster the gear rotation is (small gear
ratio), the lower the power, and vice-versa. They are inversely proportional. Therefore,
when the gear rotation becomes too fast, the robot may not have enough power to move
smoothly.
2. Explanation of Mechanism




































































