





























120
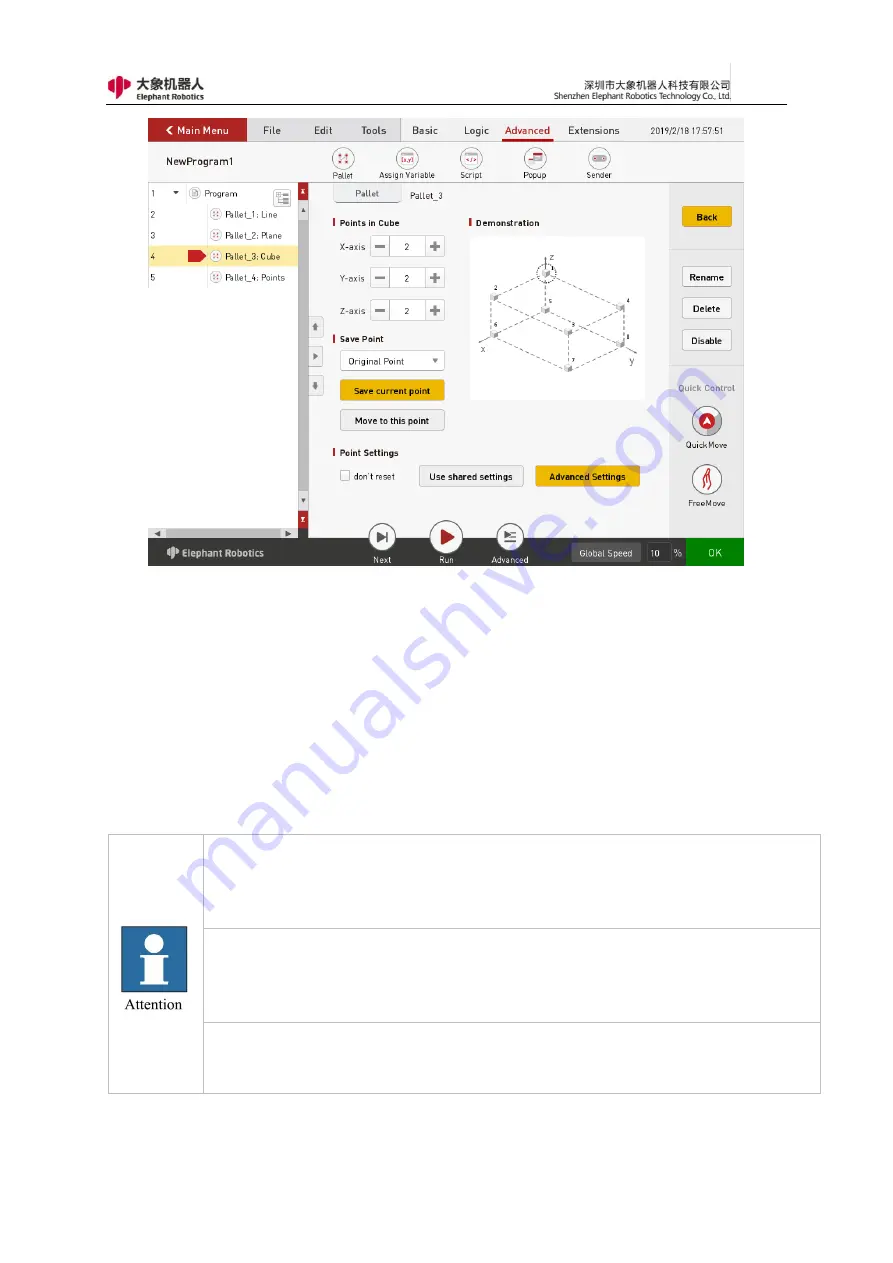
Figure 4- 25 Cube
As shown in Figure 4-26, when “Discrete Point” is selected, the number of
points is selected to teach different points. That is, a discrete point is a collection
of multiple points.
Whichever type is chosen, the robot will move to the first point when this instruction
is executed for the first time.
The second time, the robot moves to the second point.
The nth time the instruction is run, it moves to the nth point.
Until all the points have
arrived, the robot will start again from the first point.
Note that if you need to control the position of the robot to reach each point
separately, this command needs to be used in conjunction with the loop instruction.
This instruction is only executed once and only controls the robot to reach the first
point.
If you select "Do not reset", then stop running the program before all points have
been executed. When you run it again, it will start from the point of the last
interruption, not from the first position.
Summary of Contents for myCobot Pro 600
Page 1: ...1 Elephant Robotics User Manual myCobot Pro 600 Language English Compiled in 2022 3 28...
Page 27: ...27 Fig 2 9 State of Being Not Powered On...
Page 28: ...28 Fig 2 10 In the Process of Being Powered On Fig 2 11 Completion of Being Powered On...
Page 35: ...35...
Page 37: ...37 3 2 Product Appearance and Composition Fig 3 1 Product Composition...
Page 38: ...38 3 3 Working Principles and Specifications 3 3 1 Working Space...
Page 39: ...39 3 3 2 Coordinate System DH parameters and coordinate system Fig 3 2 DH Coordinate System...
Page 40: ...40 Fig 3 2 DH Coordinate Parameter...
Page 45: ...45 Fig 3 10 Size Parameters of End Mounting Hole...
Page 75: ...75 Figure 2 25 Language and unit 6 Time Figure 2 26 shows the time setting page...
Page 88: ...88 Figure 3 13 Network settings...
Page 95: ...95 Figure 3 21 Basic Settings...
Page 113: ...113 Figure 4 17 Subprogram Figure 4 18 Display subroutine...
Page 135: ...135 Fig 5 88 Connect to RoboFlow Fig 5 89 Connected Successfully...






































































