





























90
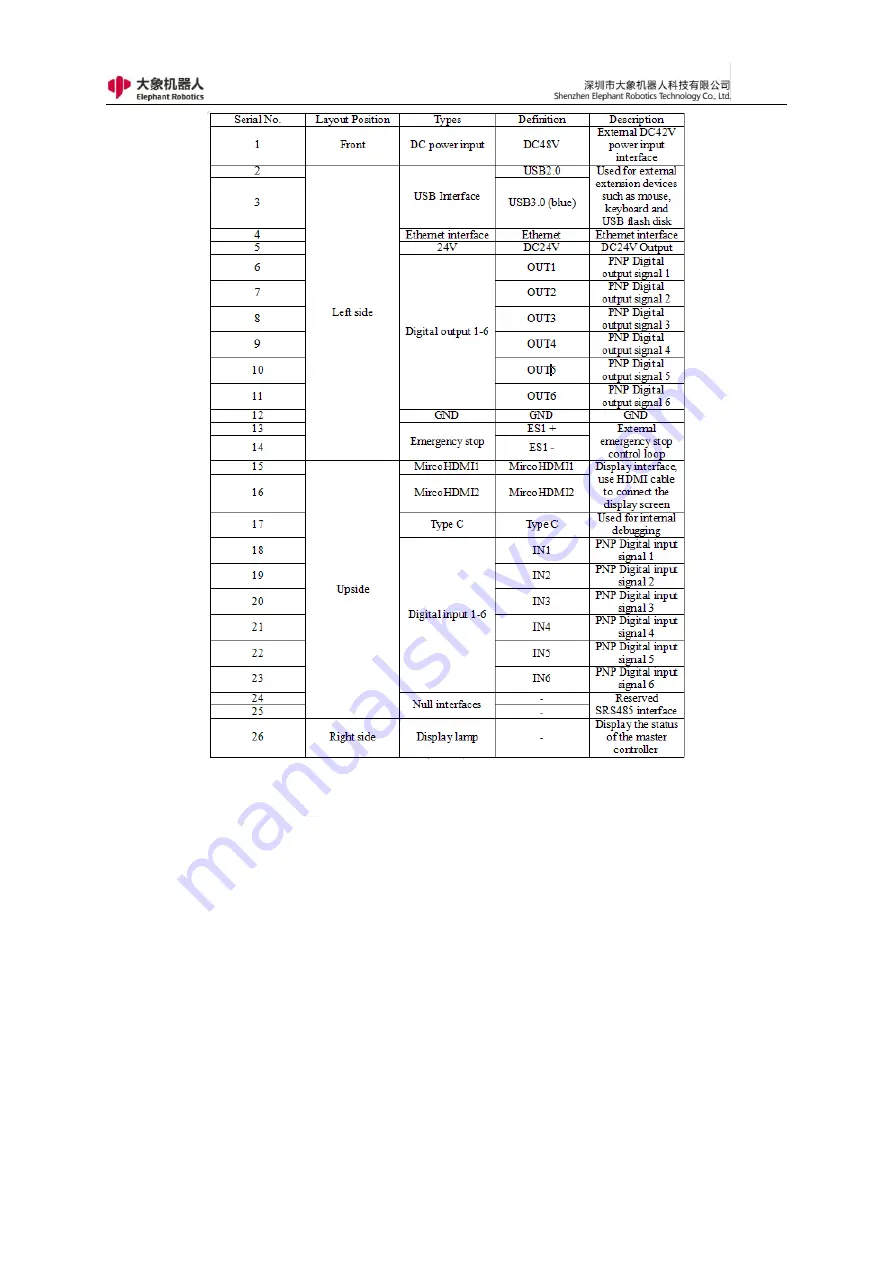
Figure 3- 15 Input and output interface description
It should be noted that the input public terminal needs to be connected to
24V power supply. It can be determined whether the input is active high or active
low according to the common configuration (hardware connection determines
24V or 0V). As shown in Figure 3-16, when the common terminal is connected
to 24V, once an external device inputs 0V, the input signal is in the “High” state,
otherwise it is in the “Low” state; vice versa.
Summary of Contents for myCobot Pro 600
Page 1: ...1 Elephant Robotics User Manual myCobot Pro 600 Language English Compiled in 2022 3 28...
Page 27: ...27 Fig 2 9 State of Being Not Powered On...
Page 28: ...28 Fig 2 10 In the Process of Being Powered On Fig 2 11 Completion of Being Powered On...
Page 35: ...35...
Page 37: ...37 3 2 Product Appearance and Composition Fig 3 1 Product Composition...
Page 38: ...38 3 3 Working Principles and Specifications 3 3 1 Working Space...
Page 39: ...39 3 3 2 Coordinate System DH parameters and coordinate system Fig 3 2 DH Coordinate System...
Page 40: ...40 Fig 3 2 DH Coordinate Parameter...
Page 45: ...45 Fig 3 10 Size Parameters of End Mounting Hole...
Page 75: ...75 Figure 2 25 Language and unit 6 Time Figure 2 26 shows the time setting page...
Page 88: ...88 Figure 3 13 Network settings...
Page 95: ...95 Figure 3 21 Basic Settings...
Page 113: ...113 Figure 4 17 Subprogram Figure 4 18 Display subroutine...
Page 135: ...135 Fig 5 88 Connect to RoboFlow Fig 5 89 Connected Successfully...































































