





























98
①
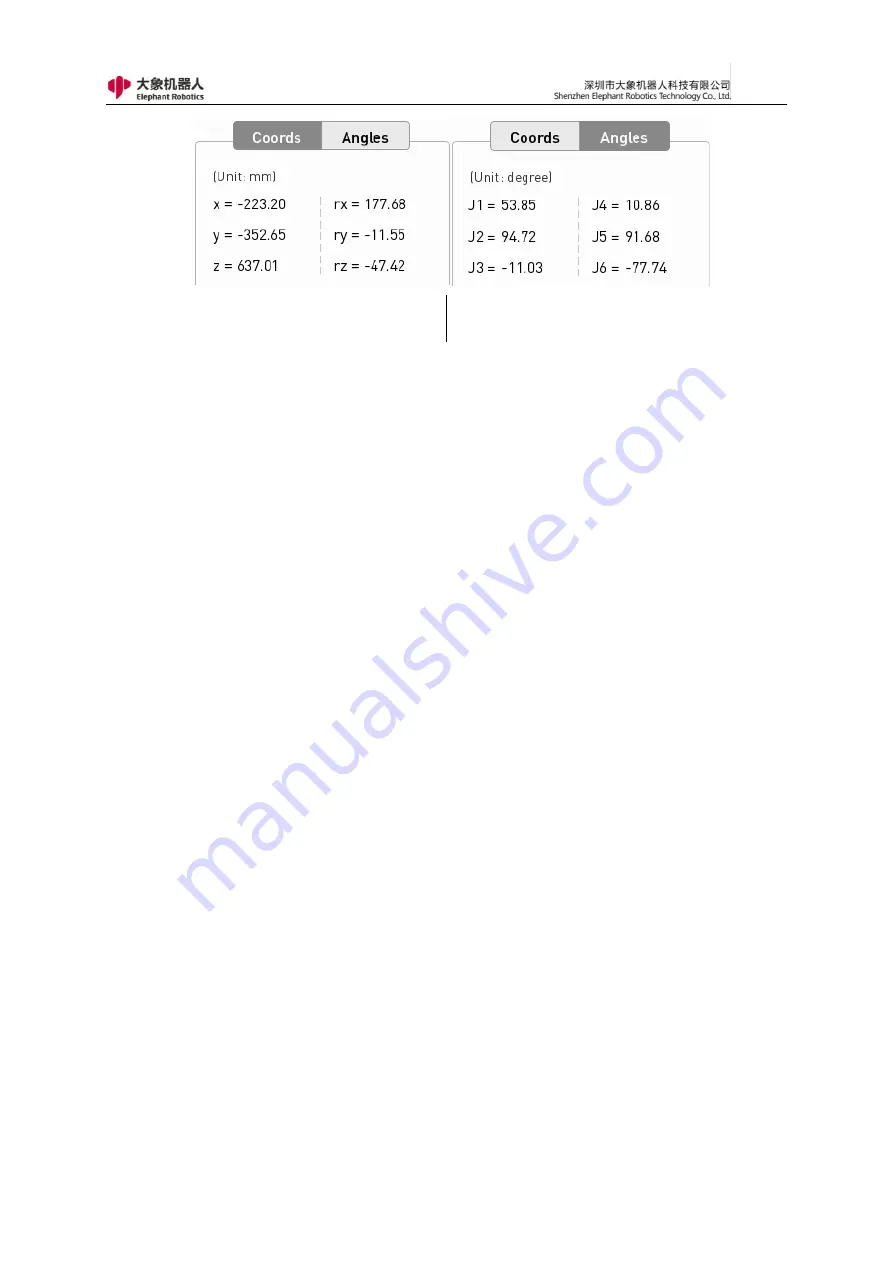
- Coordinate
②
- Angle
Figure 4- 2 Absolute point Position data
2)
Waypoint control
A.
Save current point
This button is used to save the current pose data of the robot.
B.
Move to this point
If you need to verify the teaching point or move to the teaching point
for some operations, press and hold the button until the robot moves
to the current teaching point.
C.
Clear saved points
If the current teaching point is no longer needed, this button is used
to clear the current teaching point.
1)
Advanced Features
A.
Shared configuration: This feature is being debugged, so stay tuned!
B.
Advanced configuration
As shown in Figure 4-3, in the advanced configuration page, the user
can set the movement mode, proximity mode, command speed, and
torque limit.
Summary of Contents for myCobot Pro 600
Page 1: ...1 Elephant Robotics User Manual myCobot Pro 600 Language English Compiled in 2022 3 28...
Page 27: ...27 Fig 2 9 State of Being Not Powered On...
Page 28: ...28 Fig 2 10 In the Process of Being Powered On Fig 2 11 Completion of Being Powered On...
Page 35: ...35...
Page 37: ...37 3 2 Product Appearance and Composition Fig 3 1 Product Composition...
Page 38: ...38 3 3 Working Principles and Specifications 3 3 1 Working Space...
Page 39: ...39 3 3 2 Coordinate System DH parameters and coordinate system Fig 3 2 DH Coordinate System...
Page 40: ...40 Fig 3 2 DH Coordinate Parameter...
Page 45: ...45 Fig 3 10 Size Parameters of End Mounting Hole...
Page 75: ...75 Figure 2 25 Language and unit 6 Time Figure 2 26 shows the time setting page...
Page 88: ...88 Figure 3 13 Network settings...
Page 95: ...95 Figure 3 21 Basic Settings...
Page 113: ...113 Figure 4 17 Subprogram Figure 4 18 Display subroutine...
Page 135: ...135 Fig 5 88 Connect to RoboFlow Fig 5 89 Connected Successfully...




































































