























Shenzhen Elephant Robotics Technology Co., Ltd.
25
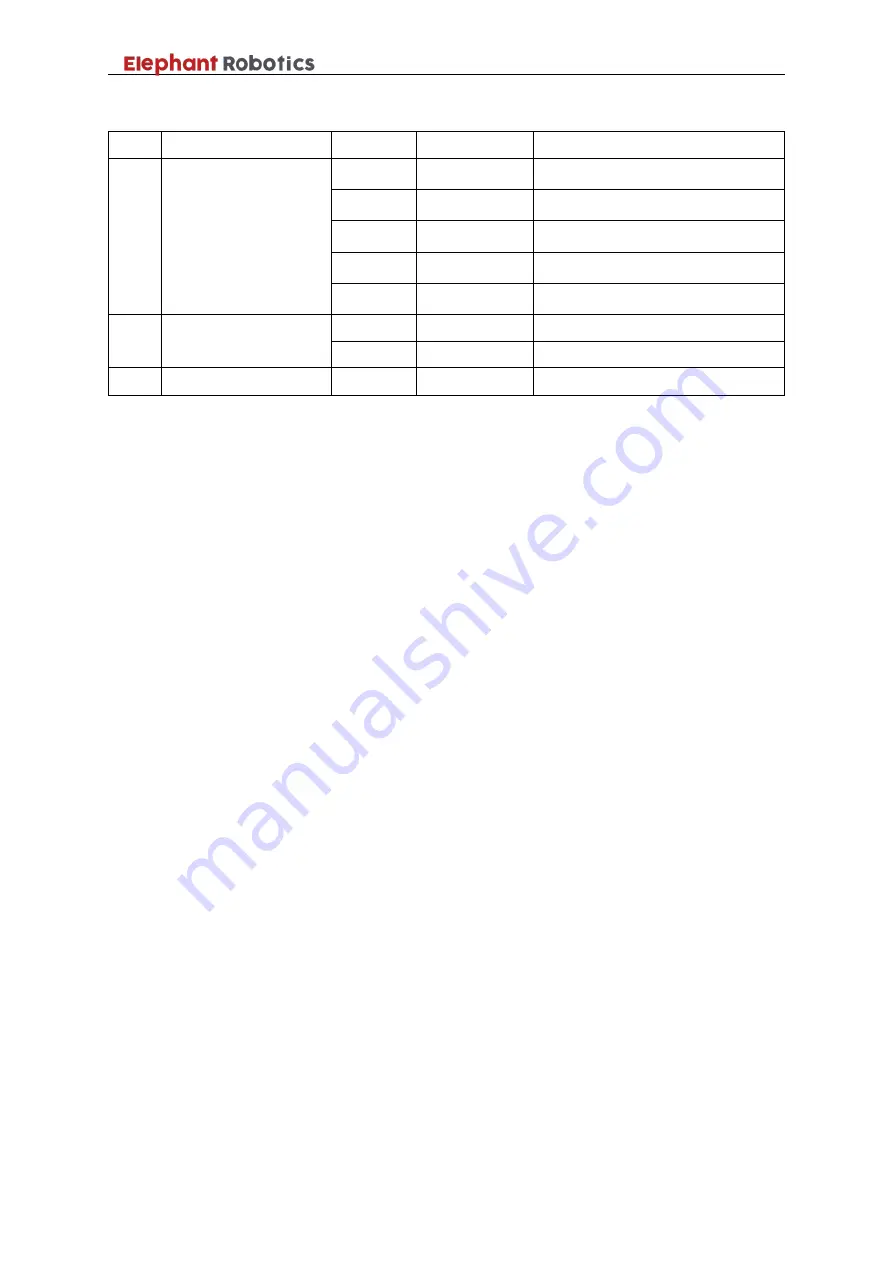
Table 3- 4 IO port description table 1
(
Communication port
)
No.
Type
Port
Definition
Description
1
Serial port
0
GND
Signal ground
(
RS232
)
1
232RX
Receive data
(
RS232
)
2
232TX
Send data
(
RS232
)
3
485D+
Receive data
(
RS485
)
4
485D-
Send data
(
RS485
)
8
USB port
-
USB1
USB port 1
-
USB2
USB port 2
9
Ethernet interface
-
Ethernet
Ethernet interface
1) Serial communication: The serial port sends and receives bytes in bits.
It’s simple and able to communicate over long distances.
In this IO board, serial communication is divided into RS232 and RS485.
The former occupies the first three ports of the terminal block, and the latter
occupies the last two ports. RS232 is full-duplex, the serial port can receive data
while using one line to send data while using another line. RS485 is half-duplex,
and only one point can be sent at any time. Therefore, the transmitting circuit
must be controlled by an enable signal.
RS485 and RS232 are only differences in the physical protocol of
communication (interface standard) . RS485 adopts differential transmission
mode, and RS232 is single-ended transmission mode. But the communication
program doesn't have much difference.
Users can choose one according to actual needs.
2)
USB port
Users can use the USB interface to copy program files, or use the USB
interface to connect peripherals such as mice and keyboards.
3) Ethernet interface
Users can use the Ethernet interface for communication between the PC
and the robot system, or for Ethernet communication with other devices.
2
,
Control signal port
As shown in Table 3-5, the IO board provides the control signal port.





































































