




























Page 43 of 130
DOC No.
:
T202001006
interface signal from the general I/O interface signal.
2. All safety-related I/Os are constructed redundantly (two
independent channels). Keep the two channels independent so
that a single failure may not lead to loss of the safety function.
3. Safety functions must be verified before putting the robot
into operation. Safety functions must be tested regularly.
4. The robot installation must conform to these specifications.
Failure to do so may result in serious injury or even death as
the safety stop device may be invalid.
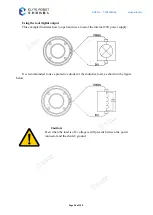
8.3.2.1 Default safety configuration
The default configuration is implemented for the delivered robot, which can be operated in
absence of any additional safety equipment (the teach pendant is equipped with the emergency
stop button; the equivalent circuit is shown below; and the short circuit is required to implement
for E_STOP1 and GNDP when the E_STOP1 enabling is not configured in the software).
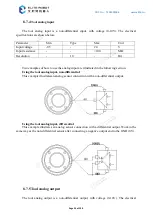
8.3.2.2 Connecting with the emergency stop button
Most applications require one or more additional emergency stop buttons. The operational
principle (the E_STOP1 function enabling needs to be configured in the software) of the one or
more emergency stop buttons is shown in the following figure.





























































