




























Page 56 of 130
DOC No.
:
T202001006
specifications are shown below.
Parameter
Min
Type
Max
Unit
Output current
-
17
-
mA
Output short circuit current
-
60
-
mA
Resolution
-
10
-
Bit
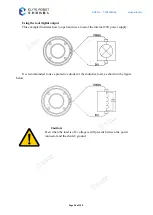
The examples of how to use the analog output are illustrated in the following section.
Using the tool analog output
This example illustrates a method of connecting to an analog signal with a non-differential
output.
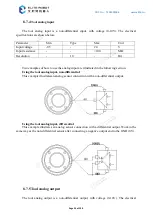
8.7.6 Tool communication I/O
Signal requests: RS485 signals use internal fail-safe biasing. If the connected device is not
compatible with this fail-safe, the signal biasing must either be done in the connected tool, or
added externally by adding a pull-up resistor to RS485+ and a pull-down resistor to RS485-.
The latency is 2ms to 4ms from writing in data to be sent on a robot controller to the start of
sending the data on the RS485. The latency is 2ms to 4ms from the start of receiving the data
on the RS485 to receiving of the data by the robot controller and the start of handling.
Baud rate
2.4k, 4.8k, 9.6k, 19.2k, 38.4k, 57.6k, 115.2k
Stop bit
1, 2
Parity bit
Null, Odd, Even

































































