




























118
ADVANCED USER GUIDE
IP66/Nema 4X variable speed drive
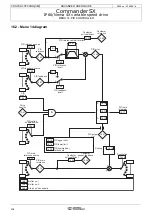
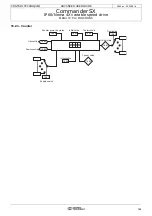
MENU 14: PID CONTROLLER
CONTROL TECHNIQUES
3854 en - 03.2008 / b
: PID output scaling
Adjustment range : 0 to 2.50
Factory setting
: 1.00
This parameter is used to scale the PID output before it is
added to the main reference.
The sum of both references is automatically scaled according
to the adjustment range of the parameter to which it is
addressed.
: PID output destination
Adjustment range :
0.00
to
21.51
Factory setting
:
0.00
Used to define to which parameter the PID output is
addressed.
Only unprotected non-bit parameters can be assigned.
If an unsuitable parameter is assigned, the output will not be
sent to any address.
If the PID output is supposed to affect the speed, it is
advisable to address it to a preset reference.
: PID hold integrator
Adjustment range : 0 or 1
Factory setting
: 0
0 (Disabled) (OFF): Integration is carried out normally
when the PID loop is activated.
1 (Enabled) (On): The value of the integrator is frozen and
remains at this value until
14.17
goes back to 0.
In both cases, when the PID loop is deactivated, the value of
the integrator is reset to 0.
: PID symmetrical limit enable
Adjustment range : 0 or 1
Factory setting
: 0
0 (Disabled) (OFF): Inactive.
1 (Enabled) (On):
14.13
and
14.14
take the same value
and it is
14.13
which is effective.
: PID main reference
Adjustment range : ± 100.0%
This parameter indicates the value of the main reference.
: PID reference
Adjustment range : ± 100.0%
This parameter indicates the value of the PID reference.
: PID feedback
Adjustment range : ± 100.0%
This parameter indicates the value of the PID feedback.
: PID error
Adjustment range : ± 100.0%
This parameter indicates the error between the main
reference and the feedback.
to
: Not used
: Buffer no. 1
Adjustment range : ± 100.00%
Factory setting
: 0
This parameter is used to assign an analog input to the PID
reference or feedback.
: Buffer no. 2
Adjustment range : ± 100.00%
Factory setting
: 0
This parameter is used to assign an analog input to the PID
reference or feedback.
: Customer unit coefficient
Adjustment range : 0 to 30
Factory setting
: 1
This parameter is a multiplication coefficient allowing the PID
reference and PID feedback to be displayed as a customer
value (
14.54
and
14.55
).
: Customer reference value
Adjustment range : ± 32000
This parameter indicates the value of the PID reference in
customer units (scaled using
14.53
).
: Customer feedback value
Adjustment range : ± 32000
This parameter indicates the value of the PID feedback in
customer units (scaled using
14.53
).
: Stop on Vmin enable
Adjustment range : 0 or 1
Factory setting
: 0
0 (Disabled) (OFF)
1 (Enabled) (On)
This parameter is used to enable the automatic run/stop
function when preset configuration
05
=
11.46
= 8.
During operation, if
14.56
= 1 and the flow rate is at minimum
(min. speed) for a time period set by
16.15
(parameter set
automatically when the configuration is enabled), the pump
stops.
WARNING:
This stop on Vmin function is only active when using the
"PUMP" preset configuration. When not using this
configuration,
14.56
is a simple "bit" parameter (buffer
block).
14.15
14.16
14.17
14.18
14.19
14.20
14.21
14.22
14.23
14.50
14.51
14.52
14.53
14.54
14.55
14.56







































































