


























50
ADVANCED USER GUIDE
IP66/Nema 4X variable speed drive
MENU 4: CURRENT AND TORQUE CONTROL
CONTROL TECHNIQUES
3854 en - 03.2008 / b
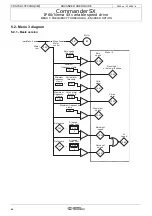
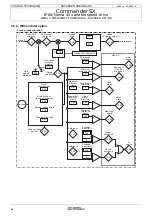
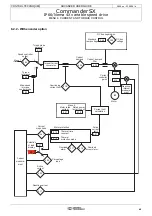
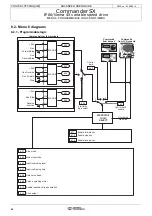
6.3 - Explanation of parameters in
menu 4
: Current magnitude
Adjustment range : 0 to max. drive current (A)
Reading of the rms current in each drive output phase.
This is the result of the vectorial sum of the reactive current
and the active current.
: Active current
Adjustment range : ± max. drive current
Reading of the active current delivered by the drive.
The active current gives a fairly precise image of the motor
torque between 10 Hz and 50 Hz.
A negative value indicates operation in generator mode with
driving load whereas a positive value indicates operation in
motor mode.
: Not used
: Current demand
Adjustment range : ± active current limit (% active In)
The current demand is the result of conversion of the torque
reference
4.08
corrected by the active current limit
4.07
.
and
:Not used
: Active current limit
Adjustment range : 0 to +300.0% (% active In)*
Factory setting
: 165.0%
Determines the active current limit that applies in both motor
and generator mode in both directions of rotation.
With frequency control (
4.11
= 0), the output frequency will
automatically be adjusted in order to adhere to the current
limit.
The current limit is an active current limit whereas the
maximum current permitted by the drive is a total current.
The maximum value of
4.07
can therefore take the following
value:
Max. active I =
%
Max. total I = 150% drive In
Active In = motor In x cos
ϕ
Reactive current =
* : The maximum value of
4.07
depends on the value of
11.32
,
5.07
and
5.10
, such that:
- For an induction motor (
11.31
= 0, 1 or 2)
- For a synchronous motor (
11.31
= 3)
: Torque reference
Adjustment range : ± 300.0% (% active In)
Factory setting
: 0
Main torque reference when the drive is configured for torque
control.
Give a positive reference for the torque to be applied
clockwise and conversely, a negative reference for the torque
to be applied counter-clockwise.
and
:Not used
: Torque mode selector
Adjustment range : 0 or 1
Factory setting
: 0
0 (Speed) (SPd): Speed control with current limiting by
parameter
4.07
.
1 (Torque) (trq): Torque control. The speed reference is no
longer active and the torque reference can be given by analog
reference 2 (if it is programmed on the torque reference,
parameter
4.08
). The output frequency is adjusted so that
the active current measured by the drive equals the
reference.
• With torque control (
4.11
= 1), the machine races
if the resistive torque drops to zero. It is therefore
essential to make sure that parameter
1.06
, which limits
the maximum speed, is set so as to ensure the safety of
equipment and personnel.
When racing occurs, the maximum speed reached is
1.06
+ 30%.
: Current demand filter (
)
Adjustment range : 0 to 10 ms
Factory setting
: 0
This filter is used to introduce a time constant aimed at
reducing any noise generated by the speed loop, such that:
time constant = 2
4.12
ms.
: Current loop proportional gain
: Current loop integral gain
Adjustment range :
4.13
= 0 to 999,
4.14
= 0 to 250
Factory setting
:
4.13
= 20
4.14
= 40
Due to a certain number of internal drive factors, oscillations
may occur in the following cases:
- Frequency control with current limiting around the rated
frequency and on load impacts
- Torque control on machines with a low load and around the
rated speed
- On a mains supply break or on a controlled deceleration
ramp when control via the DC bus is requested.
To reduce these oscillations, we recommend that you first:
- increase the proportional gain
4.13
- then reduce the integral gain
4.14
.
4.01
4.02
4.03
4.04
4.05
4.06
4.07
Max. total I
2
Reactive I
2
–
Active In
---------------------------------------------------------
100
×
Motor In
2
Active In
2
–
(
11.32
x 2,22)
x 100
(
5.07
x
5.10
)
(
11.32
x 2,22)
x 100
5.07
4.08
4.09
4.10
4.11
4.12
4.13
4.14







































































