





























22 Chapter 3 Installation and Wiring
EV1000 Series General Purpose Variable Speed Drive User Manual
3
.
CN5 Terminals Wiring
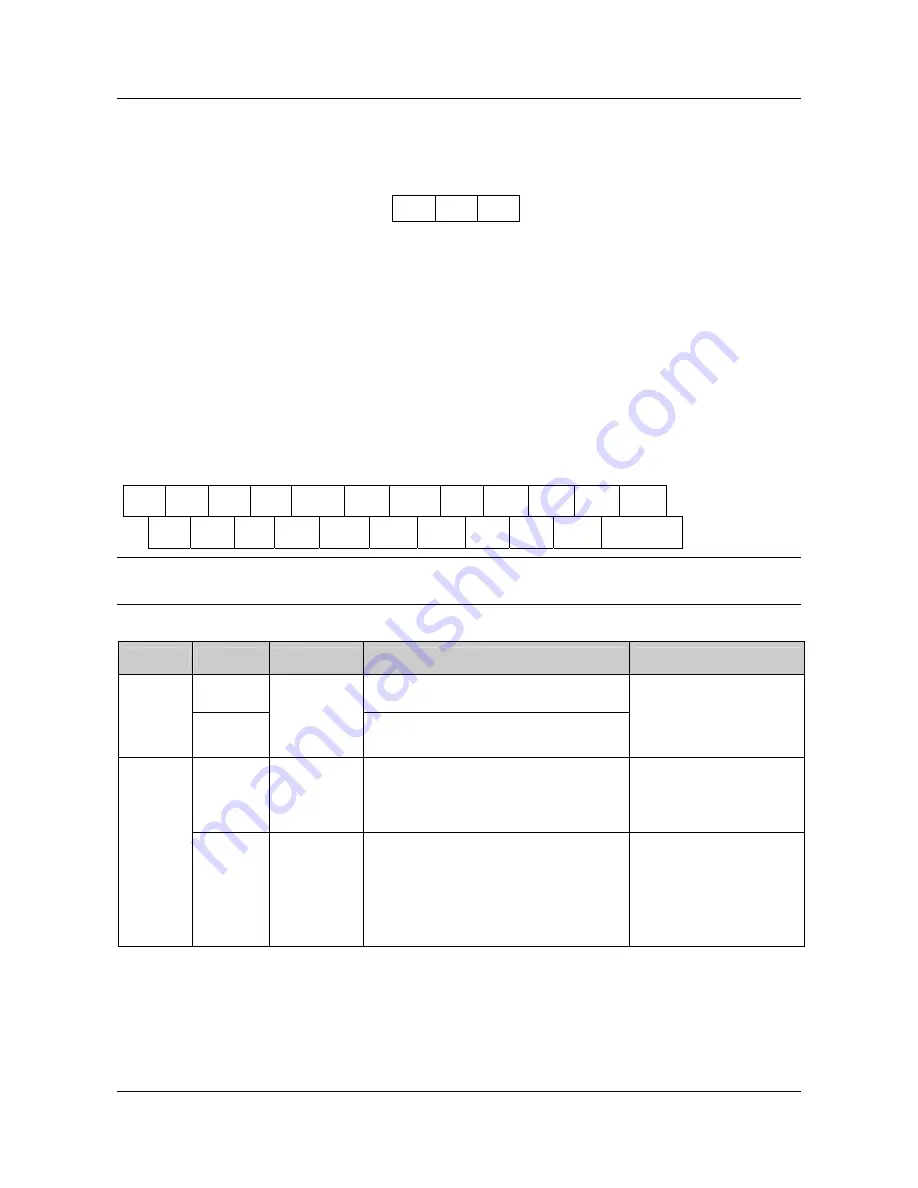
The layout of CN5 is shown in the figure below:
TB
TA
TC
TA-TB: normally closed; TA-TC: normally open
Contact capacity: 250VAC/2A
(
COS
φ
=1
),
250VAC/1A
(
COS
φ
=0.4
),
30V
DC
/1A
TA, TB and TC can be defined as multi-functional digital output signals. Please refer to Section 5.8.
If there are inductive loads, such as: electro-magnetic relay and contactor, surge snubber circuit, e.g. RC
circuit, varistor, fly-wheel diode (pay attention to the polarity when used in a DC circuit), should be
installed. Note that the leakage current should be less than the current in the contactor or relay. The
components in the snubber circuit should be installed near to the relay or contactor coil.
4
.
CN6 Wiring
CN6 Terminal strip layout:
P24 X1 X2 X3 COM X4 X5
VRF
VCI
CCI
GND
P24 PLC Y1 Y2 COM FWD
REV
AO1
AO2
GND
+RS485-
Hint
:
The “+RS485-” in the above figure means RS485+ and RS485-.
Table 3-8 CN5, CN6 Terminal Function Table
Category Terminals
Name
Function
Specification
RS485+ RS485
+
Communic
ation
RS485-
RS485
communication
port
RS485 -
Standard RS-485
communication port, please
use twisted-pair cable or
shielded cable.
VCI
Analog input
VCI
analog voltage input
(reference ground: GND)
Input voltage range:0~10V
(input resistance:100k
Ω
)
resolution:1/2000
Analog
input
CCI
analog input
CCI
accept analog voltage/current input. Jumper
CN10 can select voltage or current input
mode, Voltage input mode is the
default.(reference ground: GND)
Input voltage range:0~10V
(input resistance:100k
Ω
)
Input current range:0~20mA
(input resistance:500
Ω
)
resolution:1/2000
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312







































































