





























48 Chapter 5 Parameters
EV1000 Series General Purpose Variable Speed Drive User Manual
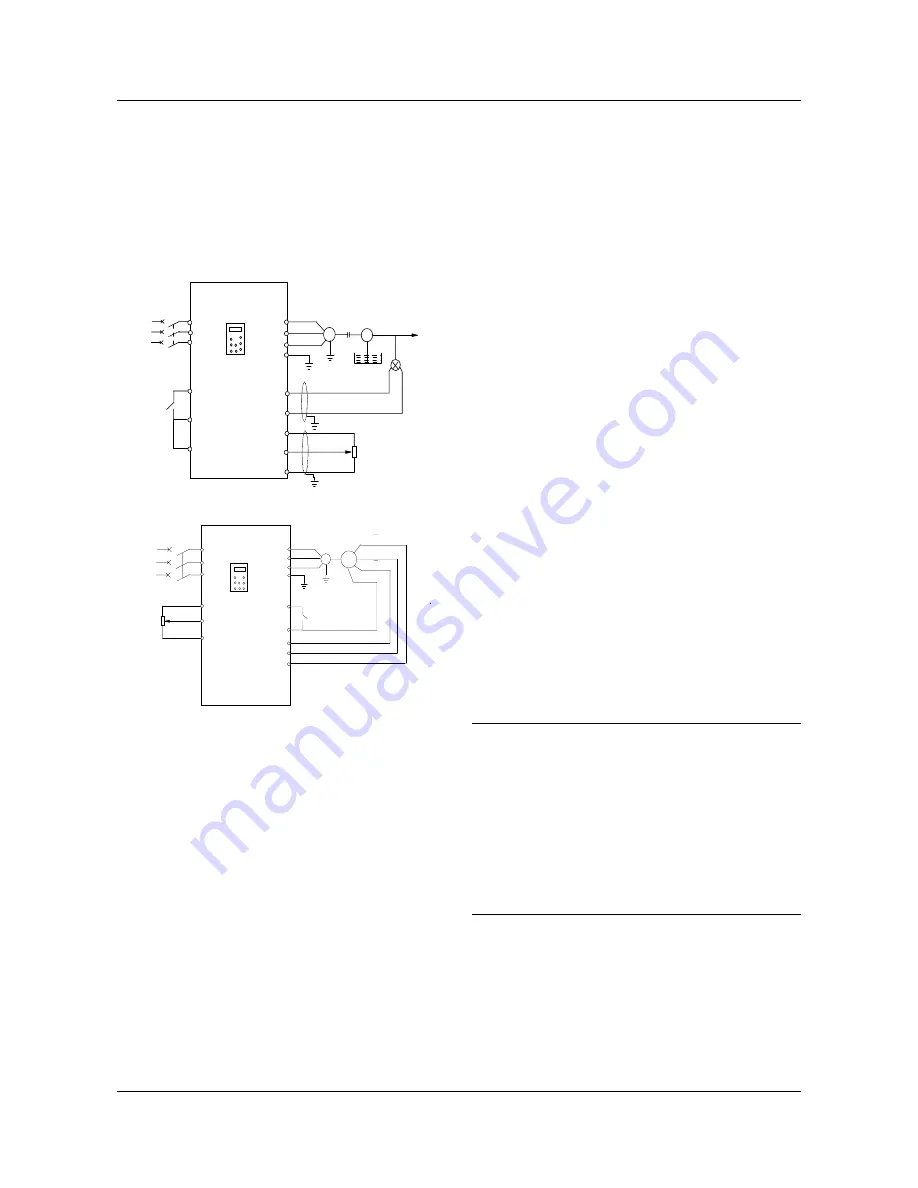
5.6 Close-loop Control (F5)
Usually, the close loop control can be divided into
two types: analog close loop and pulse close loop
according to feedback. Fig. 5-28 and Fig. 5-29
are analog and pulse close loop control wiring
diagram.
380V
EV1000
U
V
W
PE
M
P24
CCI
VRF
VCI
GND
FWD
COM
1-3K
R
S
T
P
Output
Pressure
transducer
.
GND
.
.
.
.
.
.
.
QF
Fig. 5-28 Build-in PI Analog Feedback Control
VRF
VCI
GND
1-3K
R
S
T
380V
QF
·
·
·
U
V
W
PE
M
FWD
COM
PG
A/A
B/B
PG power supply
X4
P24
X5
PG ground
·
·
·
·
·
EV1000
Fig. 5-29 PG Speed Close Loop Control System
Analog feedback control system:
An analog feedback control system can be
formed by a pressure transducer as the feedback
sensor of the internal PI.
As shown in, pressure reference (voltage signal)
is input via terminal VCI, while the feedback
pressure value is input to terminal CCI in the form
of 0~20mA current signal. The reference signal
and feedback signal are detected by the analog
channel. The start and stop of the drive can be
controlled by terminal FWD.
The above system can also use a TG (speed
measuring generator) as speed close speed-loop
control
PG speed close-loop control:
A speed close-loop control system can be formed
by external control terminals X
4
and X
5
, and pulse
generator (PG).
As shown in Fig. 5-29, close speed-loop input can
come from a potentiometer in the form of voltage
signal via terminal VCI, while the feedback value
of the close loop is input by PG in pulse mode via
terminal X4 and X5. The start and stop of the
drive can be controlled by terminal FWD.
In Fig. 5-29,
A and B are PG’s dual phase quadrature output;
P24 is connected to the power source of PG;
Speed reference is the voltage signal of 0~10V.
The voltage signal corresponds to synchronous
speed n
0
which, in turn, corresponds to 0~Max
frequency (F0.05). P is the number of poles of
motor (FH.00).
n
0
=120
×
f
max
/P
Refer to function No. 47
~
48 of F7.00~F7.04 for
the functions of input terminals X4, X5.
Note
:
1. The reference can also be input via keypad or serial
port;
2. Dual-phase input can improve the speed
measurement accuracy, while single phase input
wiring is simple;
3. Dual-phase pulse can only be input in quadrature
mode;
4. If PG is supplied from terminal P24, then the max
load current of optical PG must be less than 100mA.
The mechanism of the build-in PI is shown in the
figure below.
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312







































































