





























60 Chapter 5 Parameters
EV1000 Series General Purpose Variable Speed Drive User Manual
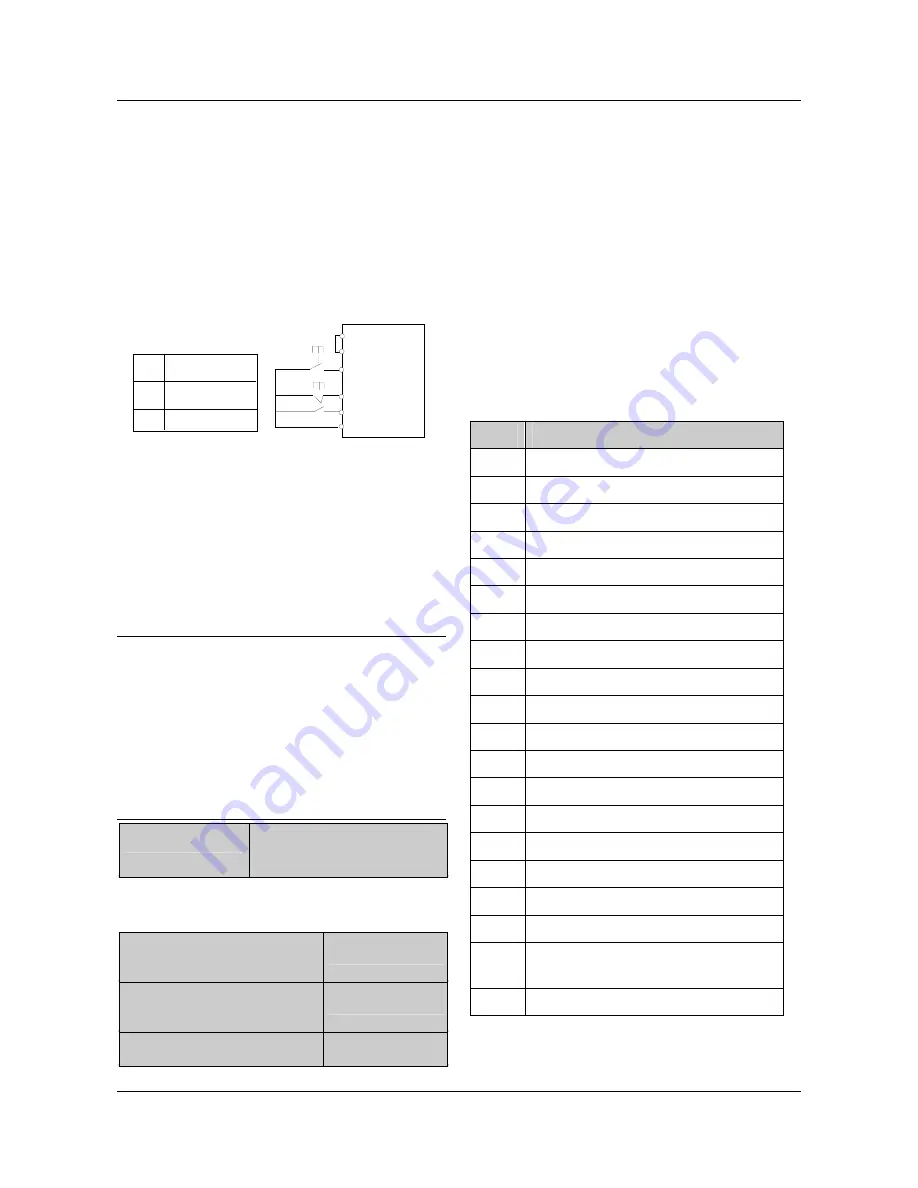
Where:
SB1:Stop button
SB2: Run forward button
SB3: Run reverse button
Terminal Xi is the multi-function input terminal of
X
1
~X
5
. For this case, the corresponding
parameter should be set at 16 (3-wire operation).
3: 3-wire operation mode 2
FWD
Xi
REV
K
COM
SB1
SB2
0
K
1
Running direction
Forward
Reverse
EV1000
.
.
.
.
PLC
P24
.
.
Fig. 5-44 3-wire operation mode 2
Where:
SB1:Stop button
SB2: Run button
Terminal Xi is the multi-function input terminal of
X
1
~X
5
. For this case, the corresponding
parameter should be set at 16 (3-wire operation).
Note
:
In terminal control mode, for 2-wire operating mode 1
and 2, although the terminal is effective, the drive will
not run if there is external stop command. If you want
to start the drive, you should activate FWD/REV
terminal again, e.g. set any of F7.00~F7.04 at 11 or 35,
PLC stop after single cycle, stop after preset length
arrival, Stop key pressed (see F9.07). When the drive
stops due to a fault, it will start immediately if the
terminal FWD/REV is enabled and the fault is cleared
F7.09 UP/DN rate Range:
0.01
~
99.99Hz/s
【
1.00Hz/s
】
To define the increase/decrease rate when using
UP/DN terminal to change reference frequency.
F7.10 Open collector output
terminal Y1
Range: 0
~
19
【
0
】
F7.11 Open collector output
terminal Y2
Range: 0
~
32
【
1
】
F7.12 Relay output function
Range: 0
~
19
【
16
】
Refer to section 3.3.2 for the output
characteristics of Y1, Y2 and the relay’s output
terminal. Table 5-9 shows the functions of the
above 3 terminals. Note that one function can be
selected repeatedly
.
F7.11=20~32, Y2 is the output pulse frequency,
range: 0~max. pulse frequency (F7.32). The
relation between the output pulse frequency and
the parameters it presents are shown in 20~32 in
the table below. The extended function 2 of host
is to control Y2 by serial port directly. The max
setting of F7.32 is 65535. See Appendix 2.
Table 5-9 Parameter Setting and Function of
Output Terminals
Setting
Function
0
Drive running signal (RUN)
1
Frequency arrival signal (FAR)
2
Frequency detection threshold (FDT1)
3
Frequency detection threshold (FDT2)
4
Overload signal (OL)
5
Low voltage lock-up signal (LU)
6
External Stop command (EXT)
7
Higher limit of frequency (FHL)
8
Lower limit of frequency (FLL)
9 Zero-speed
running
10
Completion of simple PLC operation
11
PLC cycle completion indication
12
Preset counting value arrival
13
Specified counting value arrival
14
Preset length arrival
15
Drive ready (RDY)
16 Drive
fails
17
Extended function 1 of host
18
Upper and lower limits of traverse
frequency
19
Preset operation time out
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312







































































