


























Oxymitter 5000
E-6
Instruction Manual
IM-106-350, Rev 2.2
July 2008
SETPOINT SELECTION
AND LIMITING
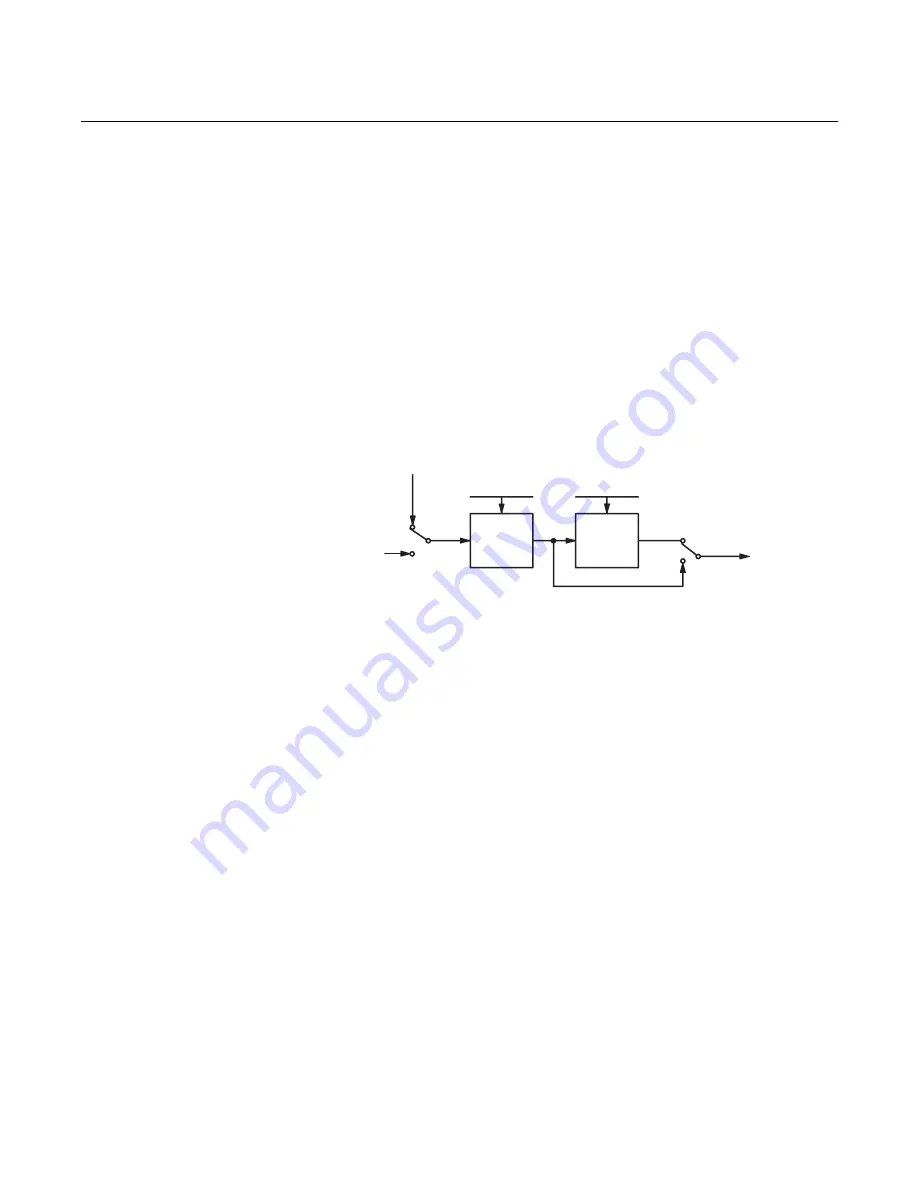
The setpoint of the PID block is determined by the mode. You can configure
the SP_HI_LIM and SP_LO_LIM parameters to limit the setpoint. In Cascade
or RemoteCascade mode, the setpoint is adjusted by another function block
or by a host computer, and the output is computed based on the setpoint.
In Automatic mode, the setpoint is entered manually by the operator, and the
output is computed based on the setpoint. In Auto mode, you can also adjust
the setpoint limit and the setpoint rate of change using the SP_RATE_UP and
SP_RATE_DN parameters.
In Manual mode the output is entered manually by the operator, and is
independent of the setpoint. In RemoteOutput mode, the output is entered by
a host computer, and is independent of the setpoint.
Figure E-2 illustrates the method for setpoint selection.
Figure E-2. PID Function Block
Setpoint Selection
FILTERING
The filtering feature changes the response time of the device to smooth
variations in output readings caused by rapid changes in input. You can
configure the filtering feature with the FILTER_TYPE parameter, and you can
adjust the filter time constant (in seconds) using the PV_FTIME or SP_FTIME
parameters. Set the filter time constant to zero to disable the filter feature.
FEEDFORWARD
CALCULATION
The feedforward value (FF_VAL) is scaled (FF_SCALE) to a common range
for compatibility with the output scale (OUT_SCALE). A gain value (FF_GAIN)
is applied to achieve the total feedforward contribution.
TRACKING
You enable the use of output tracking through the control options. You can set
control options in Manual or Out of Service mode only.
The Track Enable control option must be set to True for the track function to
operate. When the Track in Manual control option is set to True, tracking can
be activated and maintained only when the block is in Manual mode. When
Track in Manual is False, the operator can override the tracking function
when the block is in Manual mode. Activating the track function causes the
block’s actual mode to revert to Local Override.
The TRK_VAL parameter specifies the value to be converted and tracked into
the output when the track function is operating. The TRK_SCALE parameter
specifies the range of TRK_VAL.
When the TRK_IN_D parameter is True and the Track Enable control option
is True, the TRK_VAL input is converted to the appropriate value and output in
units of OUT_SCALE.
38730130
Operator
Setpoint
SP_HI_LIM
SP_LO_LIM
SP_RATE_UP
SP_RATE_DN
Setpoint
Limiting
Rate
Limiting
Auto
Man
Auto
Man
Cas
Cas
Summary of Contents for Oxymitter 5000
Page 2: ......
Page 6: ......
Page 12: ......
Page 22: ...Oxymitter 5000 xii Instruction Manual IM 106 350 Rev 2 2 July 2008 ...
Page 42: ...Oxymitter 5000 1 20 Instruction Manual IM 106 350 Rev 2 2 July 2008 ...
Page 62: ...Oxymitter 5000 2 20 Instruction Manual IM 106 350 Rev 2 2 July 2008 ...
Page 74: ...Oxymitter 5000 4 6 Instruction Manual IM 106 350 Rev 2 2 July 2008 ...
Page 78: ...Oxymitter 5000 5 4 Instruction Manual IM 106 350 Rev 2 2 July 2008 ...
Page 94: ...Oxymitter 5000 7 6 Instruction Manual IM 106 350 Rev 2 2 July 2008 ...
Page 140: ...Oxymitter 5000 9 22 Instruction Manual IM 106 350 Rev 2 2 July 2008 ...
Page 184: ...Oxymitter 5000 B 2 Instruction Manual IM 106 350 Rev 2 2 July 2008 ...
Page 204: ...Oxymitter 5000 D 14 Instruction Manual IM 106 350 Rev 2 2 July 2008 ...
Page 222: ...Oxymitter 5000 E 18 Instruction Manual IM 106 350 Rev 2 2 July 2008 ...
Page 224: ...Instruction Manual IM 106 350 Rev 2 2 July 2008 Index 2 Oxymitter 5000 ...







































































