



























35
Configuration
Installation, Operation, and Maintenance Manual
ES-09373-1
Configuration
August 17, 2022
8.4
Configuration Menu (Continued)
8.4.2
PID Menu
Proportional, integral and derivative control (PID control or simply PID) is a process
control technique. It unites proportional, integral and derivative actions so that an
error signal is minimized by the proportional action, zeroed by the integral action and
obtained with an anticipative speed by the derivative action. PID control is the most
widely used in industrial automation and can act in four ways:
- Proportional control (P)
- Proportional and integral control (PI)
- Proportional and derivative control (PD)
- Proportional Integral and Derivative control (PID)
Proportional Control
•
Proportional control always works on top of the system error, that is, it will
generate an output according to the error and not as a function of time.
•
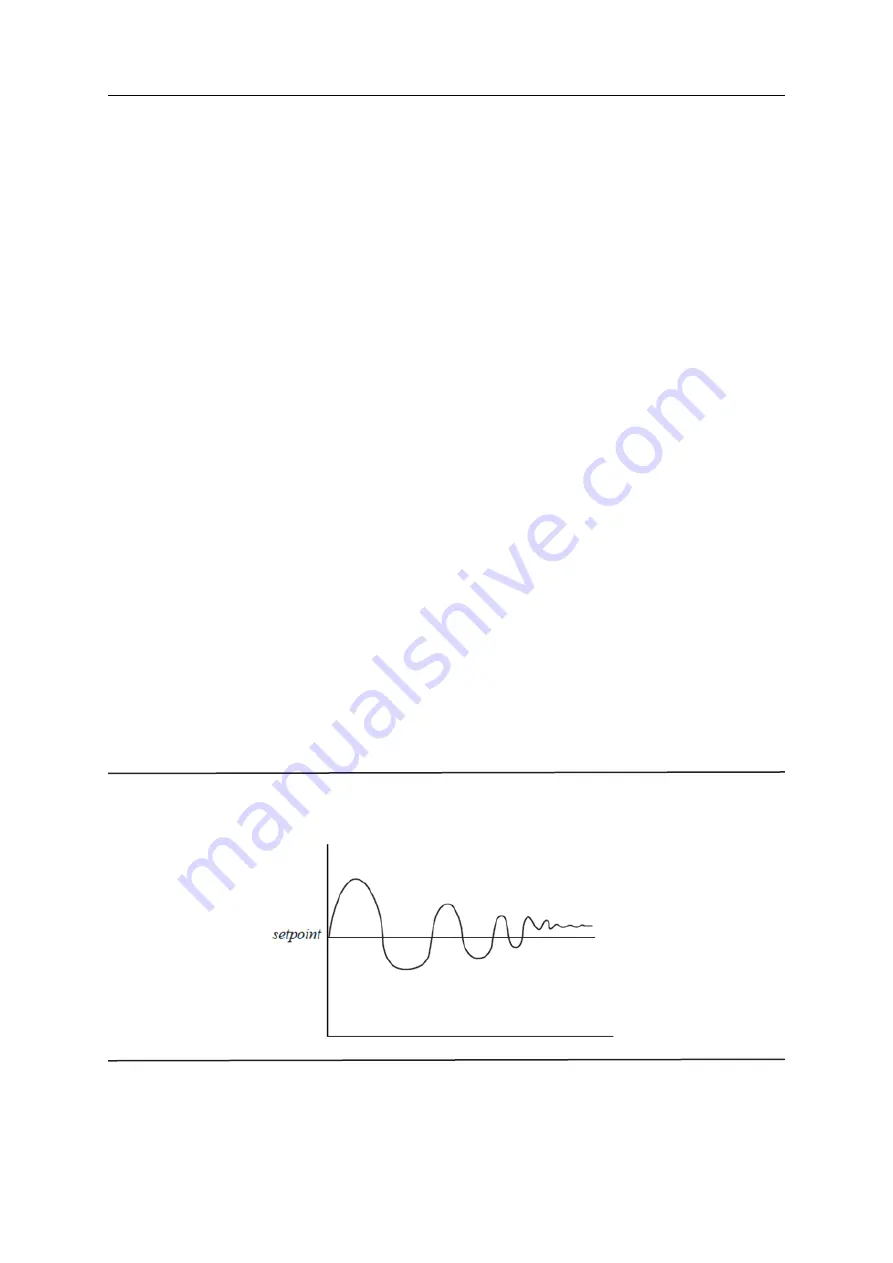
The gain (Kp) is the variable that the proportional controller uses for control. A
value that is too low for Kp will result in slow control, while a value that is too
high will result in the system oscillating around the setpoint.
•
As can be seen from the adjacent graph, the proportional action does not
eliminate the error, which is called offset.
•
This residual error consists of the steady state and can be changed by adjusting
the gain (Kp).
Figure 8-8 Proportional Control Chart



























































