





























Unidrive M400 User Guide
77
Issue Number: 2
Pr 00.041 {05.014}
Control Mode (cont)
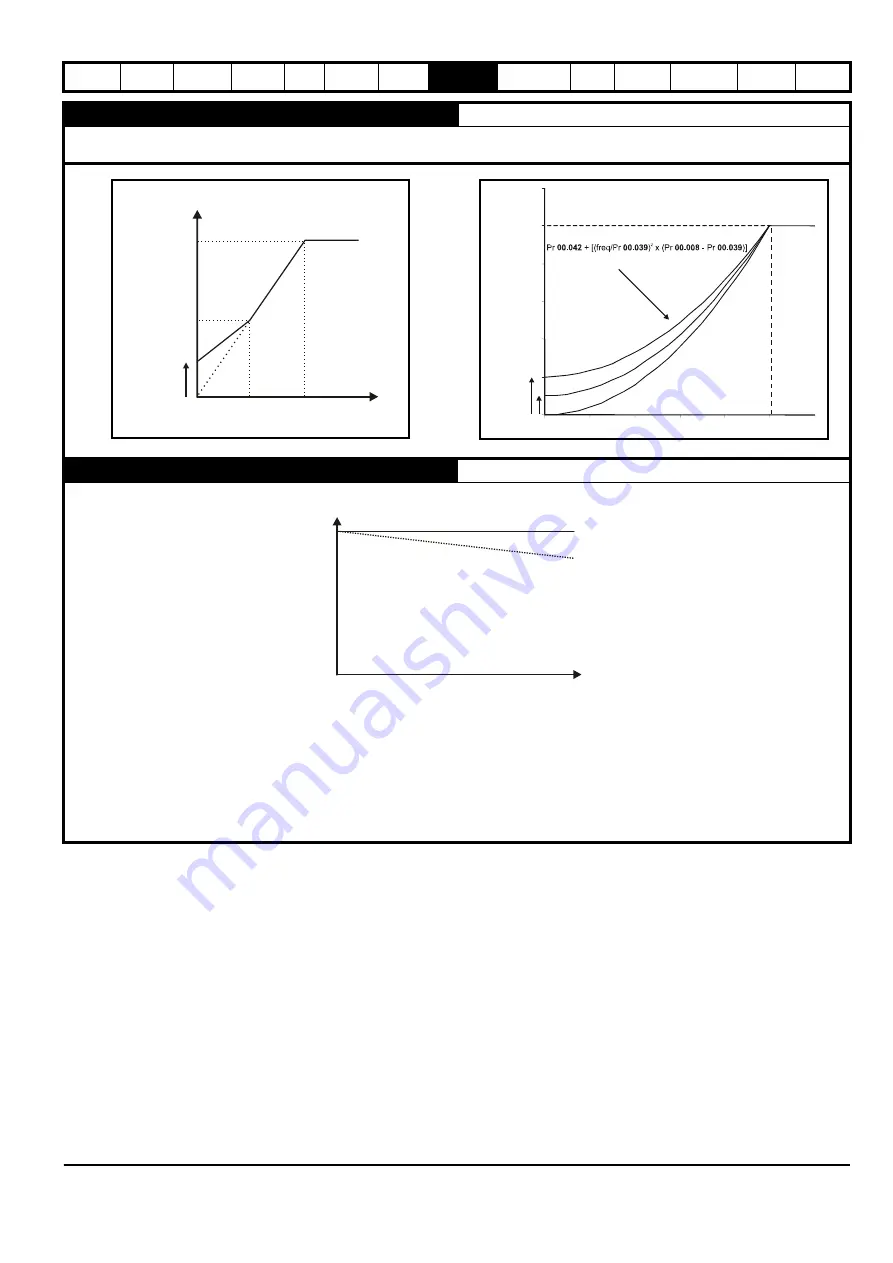
For both these modes, at low frequencies (from 0 Hz to ½ x Pr
00.039
) a voltage boost is applied as defined by Pr
00.042
as shown below:
Pr 05.027
Enable Slip Compensation
When a motor, being controlled in open loop mode, has load applied a characteristic of the motor is that the output speed droops in proportion to the
load applied as shown:
In order to prevent the speed droop shown above slip compensation should be enabled. To enable slip compensation Pr
05.027
must be set to a 1
(this is the default setting), and the motor rated speed must be entered in Pr
00.007
(Pr
05.008
).
The motor rated speed parameter should be set to the synchronous speed of the motor minus the slip speed. This is normally displayed on the
motor nameplate, i.e. for a typical 18.5 kW, 50 Hz, 4 pole motor, the motor rated speed would be approximately 1465 rpm. The synchronous speed
for a 50 Hz, 4 pole motor is 1500 rpm, so therefore the slip speed would be 35 rpm. If the synchronous speed is entered in Pr
00.007
, slip
compensation will be disabled. If too small a value is entered in Pr
00.007
, the motor will run faster than the demanded frequency. The synchronous
speeds for 50 Hz motors with different numbers of poles are as follows:
2 pole = 3000 rpm, 4 pole = 1500 rpm, 6pole =1000 rpm, 8 pole = 750 rpm
Output
voltage
Pr
/
2
00.008
Pr
00.008
Pr
/ 2
00.039
Pr
00.039
Output
frequency
Output voltage characteristic
(Fd)
Voltage boost
Pr
00.042
Pr
00.008
Pr
00.042
Pr
00.039
Shaft speed
Demanded speed
Load
Summary of Contents for Unidrive M400
Page 197: ......
Page 198: ...0478 0044 02 ...







































































