Micropilot M FMR244 with FOUNDATION Fieldbus
Appendix
Hauser
99
11.3
Function and system design
11.3.1
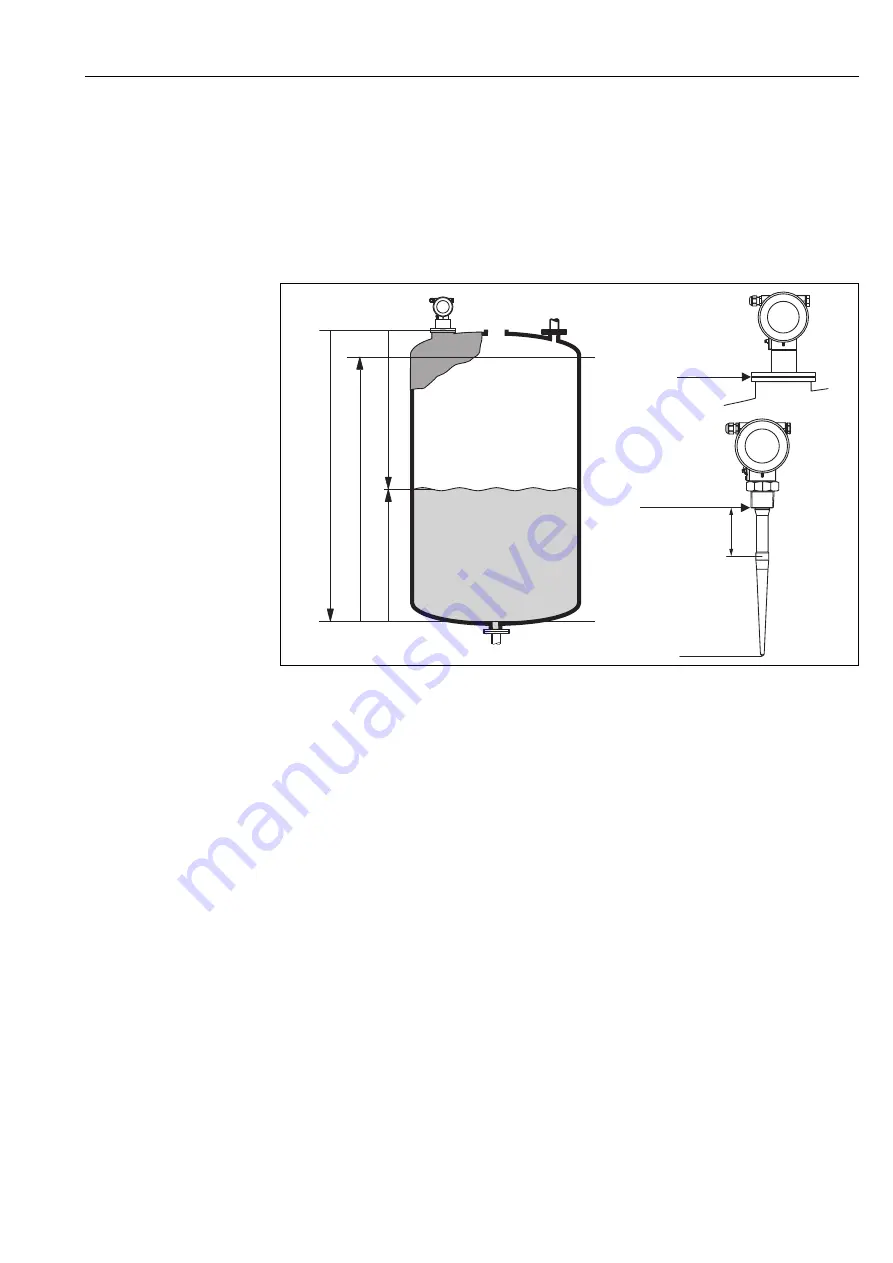
Function (Measuring principle)
The Micropilot is a "downward-looking" measuring system, operating based on the time-of-flight
method. It measures the distance from the reference point (process connection) to the product
surface. Radar impulses are emitted by an antenna, reflected off the product surface and received
again by the radar system.
L00-FMR2xxxx-15-00-00-en-001
Input
The reflected radar impulses are received by the antenna and transmitted into the electronics. A
microprocessor evaluates the signal and identifies the level echo caused by the reflection of the radar
impulse at the product surface. The unambiguous signal identification is accomplished by the
PulseMaster® software, based on many years of experience with time-of-flight technology.
The mm-accuracy of the Micropilot S could be achieved with the patented algorithms of the
PhaseMaster® software.
The distance D to the product surface is proportional to the time of flight t of the impulse:
D = c · t/2,
with c being the speed of light.
Based on the known empty distance E, the level L is calculated:
L = E – D
Refer to the above figure for the reference point for "E".
The Micropilot is equipped with functions to suppress interference echoes. The user can activate
these functions. They ensure that interference echoes (i.e. from edges and weld seams) are not
interpreted as level echo.
20 mA
100%
4 mA
0%
D
L
F
E
flange:
reference point of
measurement
flange:
reference point of
measurement
inactive
length
max.level
threaded
connection
1 ½”
(R 1
:
reference point of
measurement
BSPT
½”)
or 1½ NPT