


























Micropilot M FMR231 with FOUNDATION Fieldbus
Appendix
Hauser
101
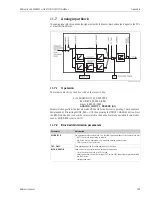
11.4.5
Methods
The FOUNDATION Fieldbus specification provides for the use of so-called methods to simplify the
operation of the device. A method is an interactive sequence of steps that must be followed in order
to obtain a particular function from the device.
The Micropilot M has got the following methods:
• Basic setup
• Safety settings
• Acknowledge alarm
• Linearisation
• Extended calibration
• Output
• System parameters
• Lock TB Manufacturer parameters
Most of these methods are identical to the respective function group in the operating menu. A
detailed description of them can be found in the "Description of Instrument functions", BA221F/
00/en.
11.4.6
Parameter list of the Micropilot M Sensor Block
Parameter
Position
Indicator
rel.
Index
Variable Name
Size
[bytes]
Type
Access
Storage
Class
Changeable
in Mode
measured value
000
18
PARMEASUREDVALUE
4
FloatingPoint
RO
dynamic
Auto, OOS
tank shape
002
19
PARTANKSHAPE
1
Unsigned8
RW
static
OOS
medium property
003
20
PARDIELECTRICCONSTANT
1
Unsigned8
RW
static
OOS
process cond.
004
21
PARPROCESSCONDITION
1
Unsigned8
RW
static
OOS
empty calibr.
005
22
PAREMPTYCALIBRATION
4
FloatingPoint
RW
static
OOS
full calibr.
006
23
PARFULLCALIBRATION
4
FloatingPoint
RW
static
OOS
pipe diameter
007
24
PARTUBEDIAMETER
4
FloatingPoint
RW
static
OOS
echo quality
056
25
PARECHOQUALITY
1
Unsigned8
RO
dynamic
Auto, OOS
check distance
051
26
PARCHECKDISTANCE
1
Unsigned8
RW
dynamic
OOS
range of mapping
052
27
PARSUPPRESSIONDISTANCE
4
FloatingPoint
RW
dynamic
OOS
start mapping
053
28
PARSTARTMAPPINGRECORD
1
Unsigned8
RW
dynamic
OOS
pres. map dist.
054
29
PARPRESMAPRANGE
4
FloatingPoint
RO
dynamic
Auto, OOS
cust. tank map
055
30
PARCUSTTANKMAP
1
Unsigned8
RW
dynamic
OOS
offset
057
31
PAROFFSETOFMEASUREDDISTANCE
4
FloatingPoint
RW
static
OOS
antenna extens.
0C9
32
PARANTENNAEXTENSIONLENGTH
4
FloatingPoint
RW
static
OOS
output damping
058
33
PAROUTPUTDAMPING
4
FloatingPoint
RW
static
Auto, OOS
blocking dist.
059
34
PARBLOCKINGDISTANCE
4
FloatingPoint
RW
static
OOS
output on alarm
010
35
PAROUTPUTONALARM
1
Unsigned8
RW
static
OOS
outp. echo loss
012
36
PARREACTIONLOSTECHO
1
Unsigned8
RW
static
OOS
ramp %span/min
013
37
PARRAMPINPERCENTPERMIN
4
FloatingPoint
RW
static
OOS
delay time
014
38
PARDELAYTIMEONLOSTECHO
2
Unsigned16
RW
static
OOS
safety distance
015
39
PARLEVELWITHINSAFETYDISTANCE
4
FloatingPoint
RW
static
OOS
in safety dist.
016
40
PARINSAFETYDISTANCE
1
Unsigned8
RW
static
OOS
ackn. alarm
017
41
PARACKNOWLEDGEALARM
1
Unsigned8
RW
dynamic
Auto, OOS
level/ullage
040
42
PARLEVELULLAGEMODE
1
Unsigned8
RW
static
OOS
linearisation
041
43
PARLINEARISATION
1
Unsigned8
RW
static
OOS
customer unit
042
44
PARCUSTOMERUNIT
2
Unsigned16
RW
static
OOS
Summary of Contents for Micropilot M FMR231
Page 95: ...Micropilot M FMR231 with FOUNDATION Fieldbus Technical data Endress Hauser 95 ...
Page 112: ...Micropilot M FMR231 with FOUNDATION Fieldbus Index 112 Endress Hauser ...
Page 113: ......
Page 114: ...www endress com worldwide BA229F 00 ae 06 07 52009950 CCS FM SGML 6 0 ProMoDo 52008600 ...







































































